Infinite-Horizon Distributionally Robust Regret-Optimal Control
Taylan Kargin ⋅ Joudi Hajar ⋅ Vikrant Malik ⋅ Babak Hassibi
2024 Poster
{kind=link}
Abstract
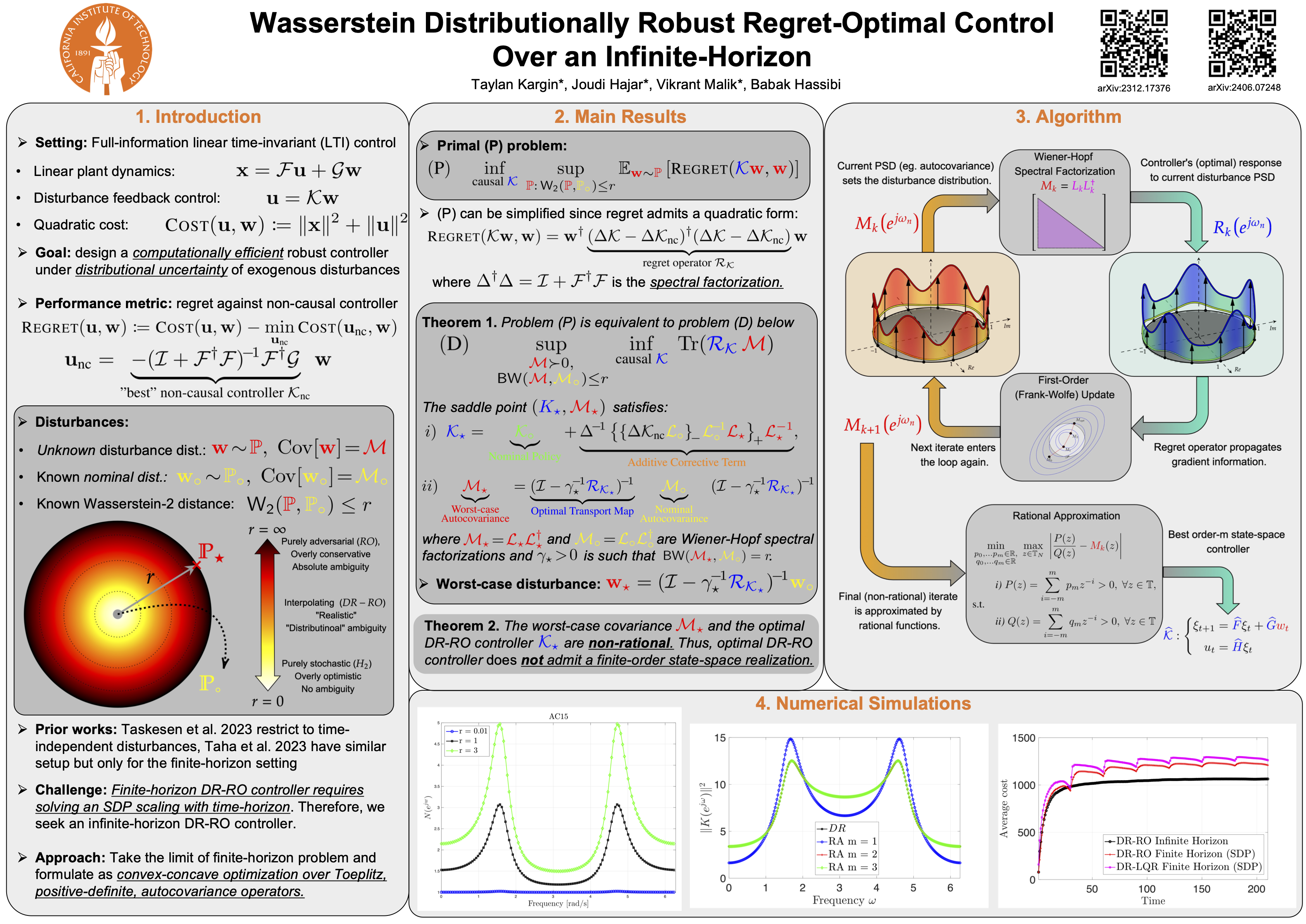
We study the infinite-horizon distributionally robust (DR) control of linear systems with quadratic costs, where disturbances have unknown, possibly time-correlated distribution within a Wasserstein-2 ambiguity set. We aim to minimize the worst-case expected regret—the excess cost of a causal policy compared to a non-causal one with access to future disturbance. Though the optimal policy lacks a finite-order state-space realization (i.e., it is non-rational), it can be characterized by a finite-dimensional parameter. Leveraging this, we develop an efficient frequency-domain algorithm to compute this optimal control policy and present a convex optimization method to construct a near-optimal state-space controller that approximates the optimal non-rational controller in the $\mathit{H}_\infty$-norm. This approach avoids solving a computationally expensive semi-definite program (SDP) that scales with the time horizon in the finite-horizon setting.
Chat is not available.
Successful Page Load