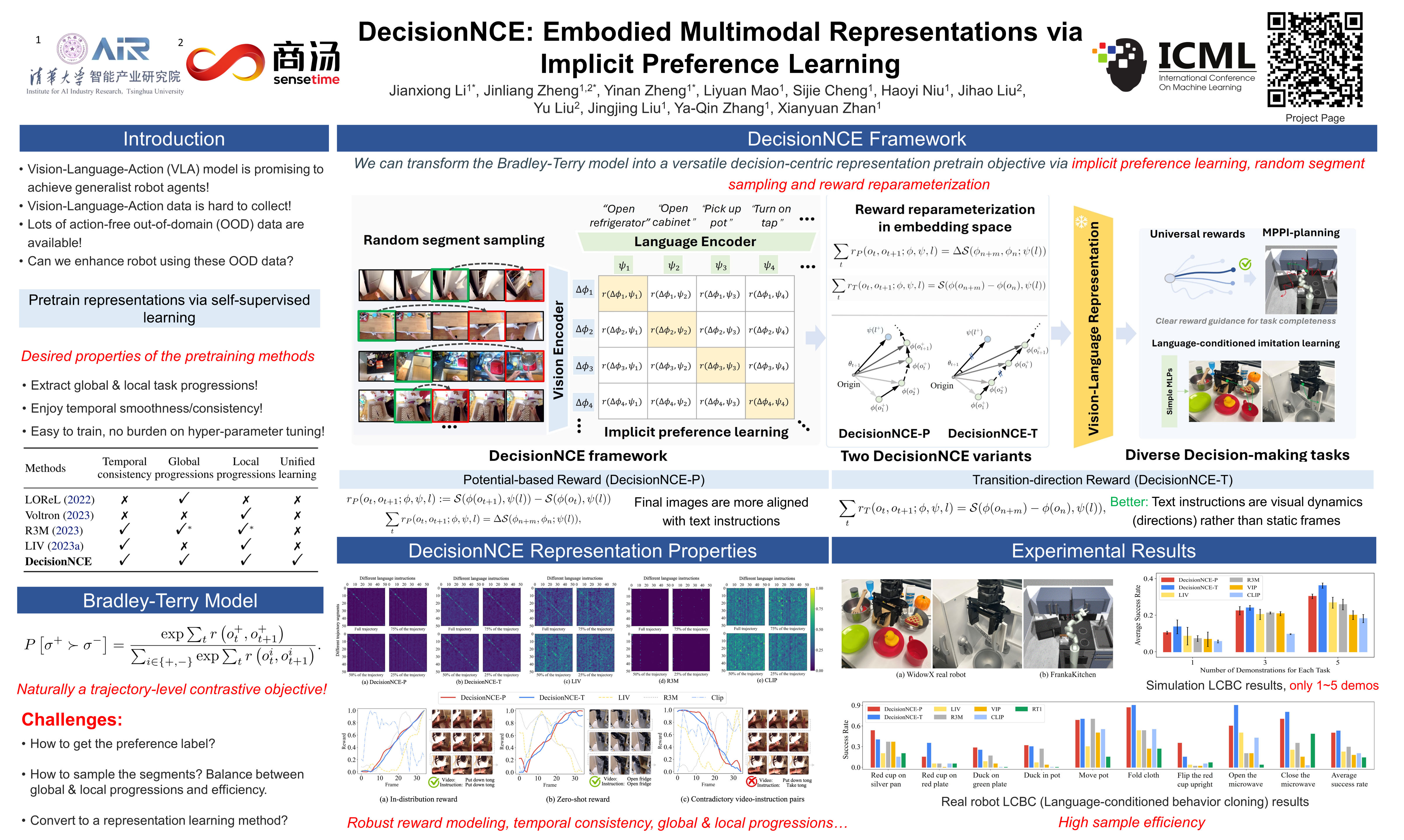
DecisionNCE: Embodied Multimodal Representations via Implicit Preference Learning
Jianxiong Li ⋅ Jinliang Zheng ⋅ Yinan Zheng ⋅ Liyuan Mao ⋅ Xiao Hu ⋅ Sijie Cheng ⋅ Haoyi Niu ⋅ Jihao Liu ⋅ Yu Liu ⋅ Jingjing Liu ⋅ Ya-Qin Zhang ⋅ Xianyuan Zhan
2024 Poster
{kind=link}
Abstract
Multimodal pretraining is an effective strategy for the trinity of goals of representation learning in autonomous robots: $1)$ extracting both local and global task progressions; $2)$ enforcing temporal consistency of visual representation; $3)$ capturing trajectory-level language grounding. Most existing methods approach these via separate objectives, which often reach sub-optimal solutions. In this paper, we propose a universal unified objective that can simultaneously extract meaningful task progression information from image sequences and seamlessly align them with language instructions. We discover that via implicit preferences, where a visual trajectory inherently aligns better with its corresponding language instruction than mismatched pairs, the popular Bradley-Terry model can transform into representation learning through proper reward reparameterizations. The resulted framework, DecisionNCE, mirrors an InfoNCE-style objective but is distinctively tailored for decision-making tasks, providing an embodied representation learning framework that elegantly extracts both local and global task progression features, with temporal consistency enforced through implicit time contrastive learning, while ensuring trajectory-level instruction grounding via multimodal joint encoding. Evaluation on both simulated and real robots demonstrates that DecisionNCE effectively facilitates diverse downstream policy learning tasks, offering a versatile solution for unified representation and reward learning. Project Page: https://2toinf.github.io/DecisionNCE/
Chat is not available.
Successful Page Load