Dr. Strategy: Model-Based Generalist Agents with Strategic Dreaming
{kind=link}
Abstract
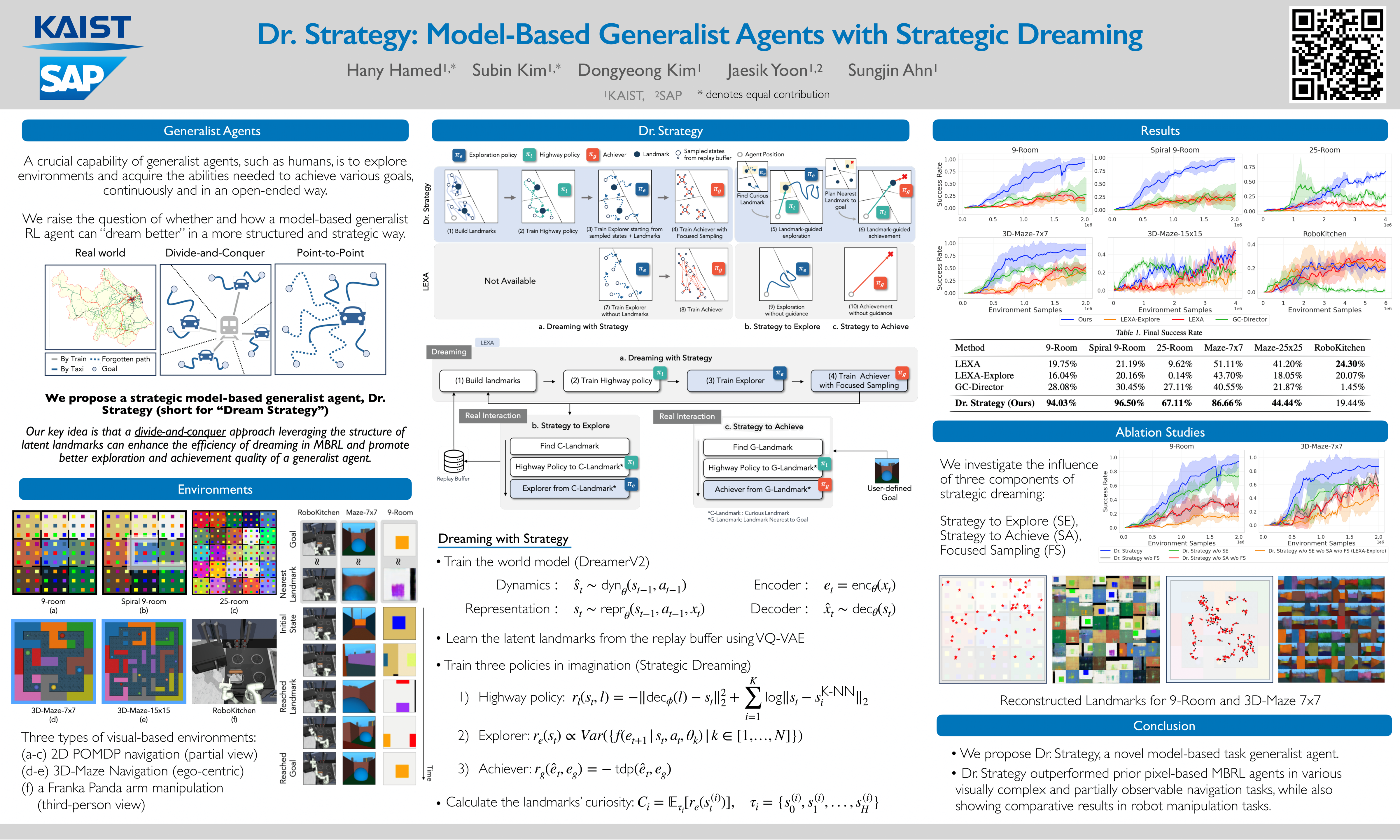
Model-based reinforcement learning (MBRL) has been a primary approach to ameliorating the sample efficiency issue as well as to make a generalist agent. However, there has not been much effort toward enhancing the strategy of dreaming itself. Therefore, it is a question whether and how an agent can ``dream better'' in a more structured and strategic way. In this paper, inspired by the observation from cognitive science suggesting that humans use a spatial divide-and-conquer strategy in planning, we propose a new MBRL agent, called Dr. Strategy, which is equipped with a novel Dreaming Strategy. The proposed agent realizes a version of divide-and-conquer-like strategy in dreaming. This is achieved by learning a set of latent landmarks and then utilizing these to learn a landmark-conditioned highway policy. With the highway policy, the agent can first learn in the dream to move to a landmark, and from there it tackles the exploration and achievement task in a more focused way. In experiments, we show that the proposed model outperforms prior pixel-based MBRL methods in various visually complex and partially observable navigation tasks.