Multi-Agent Reinforcement Learning with Hierarchical Coordination for Emergency Responder Stationing
{kind=link}
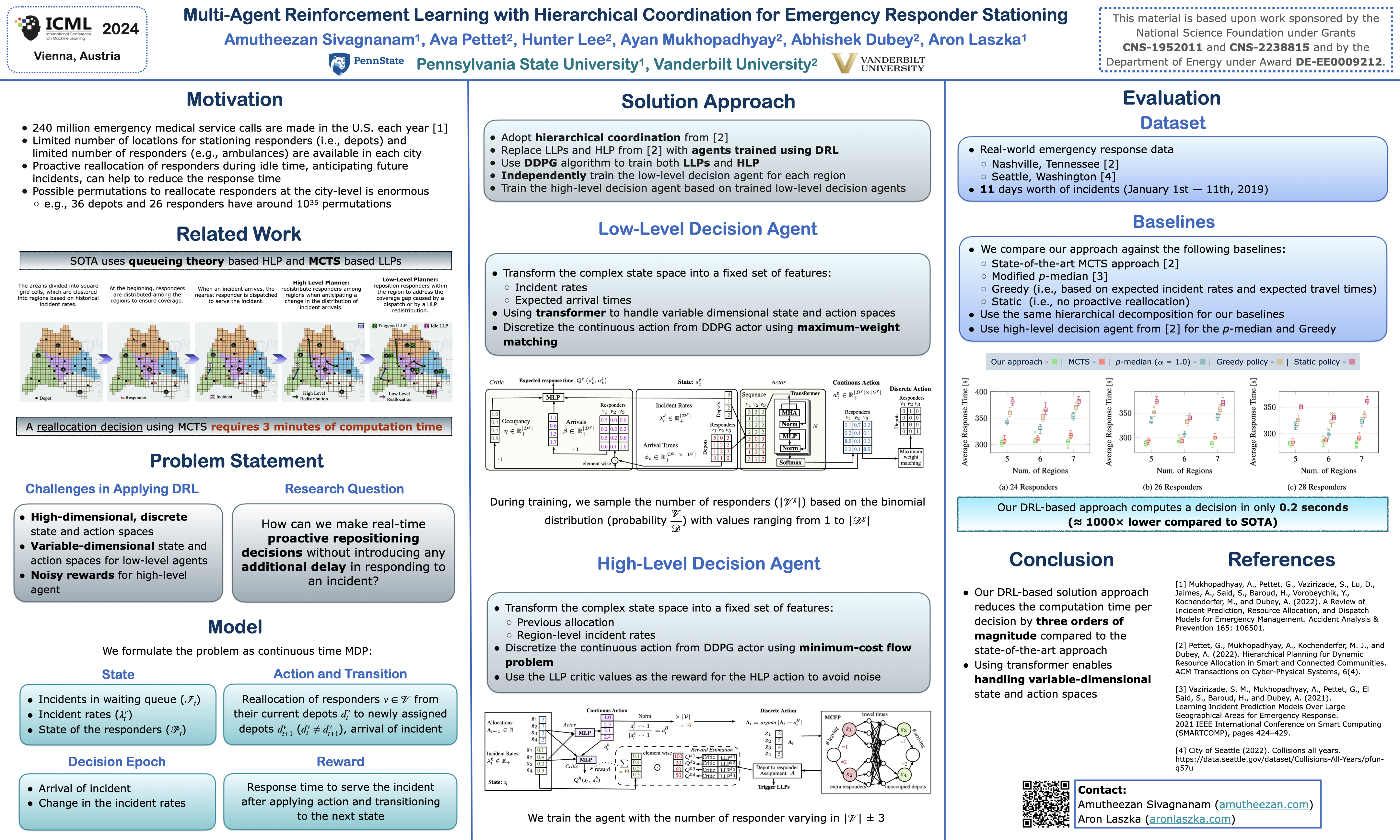
Abstract
An emergency responder management (ERM) system dispatches responders, such as ambulances, when it receives requests for medical aid. ERM systems can also proactively reposition responders between predesignated waiting locations to cover any gaps that arise due to the prior dispatch of responders or significant changes in the distribution of anticipated requests. Optimal repositioning is computationally challenging due to the exponential number of ways to allocate responders between locations and the uncertainty in future requests. The state-of-the-art approach in proactive repositioning is a hierarchical approach based on spatial decomposition and online Monte Carlo tree search, which may require minutes of computation for each decision in a domain where seconds can save lives. We address the issue of long decision times by introducing a novel reinforcement learning (RL) approach, based on the same hierarchical decomposition, but replacing online search with learning. To address the computational challenges posed by large, variable-dimensional, and discrete state and action spaces, we propose: (1) actor-critic based agents that incorporate transformers to handle variable-dimensional states and actions, (2) projections to fixed-dimensional observations to handle complex states, and (3) combinatorial techniques to map continuous actions to discrete allocations. We evaluate our approach using real-world data from two U.S. cities, Nashville, TN and Seattle, WA. Our experiments show that compared to the state of the art, our approach reduces computation time per decision by three orders of magnitude, while also slightly reducing average ambulance response time by 5 seconds.