Symmetry-Aware Robot Design with Structured Subgroups
{kind=link}
Abstract
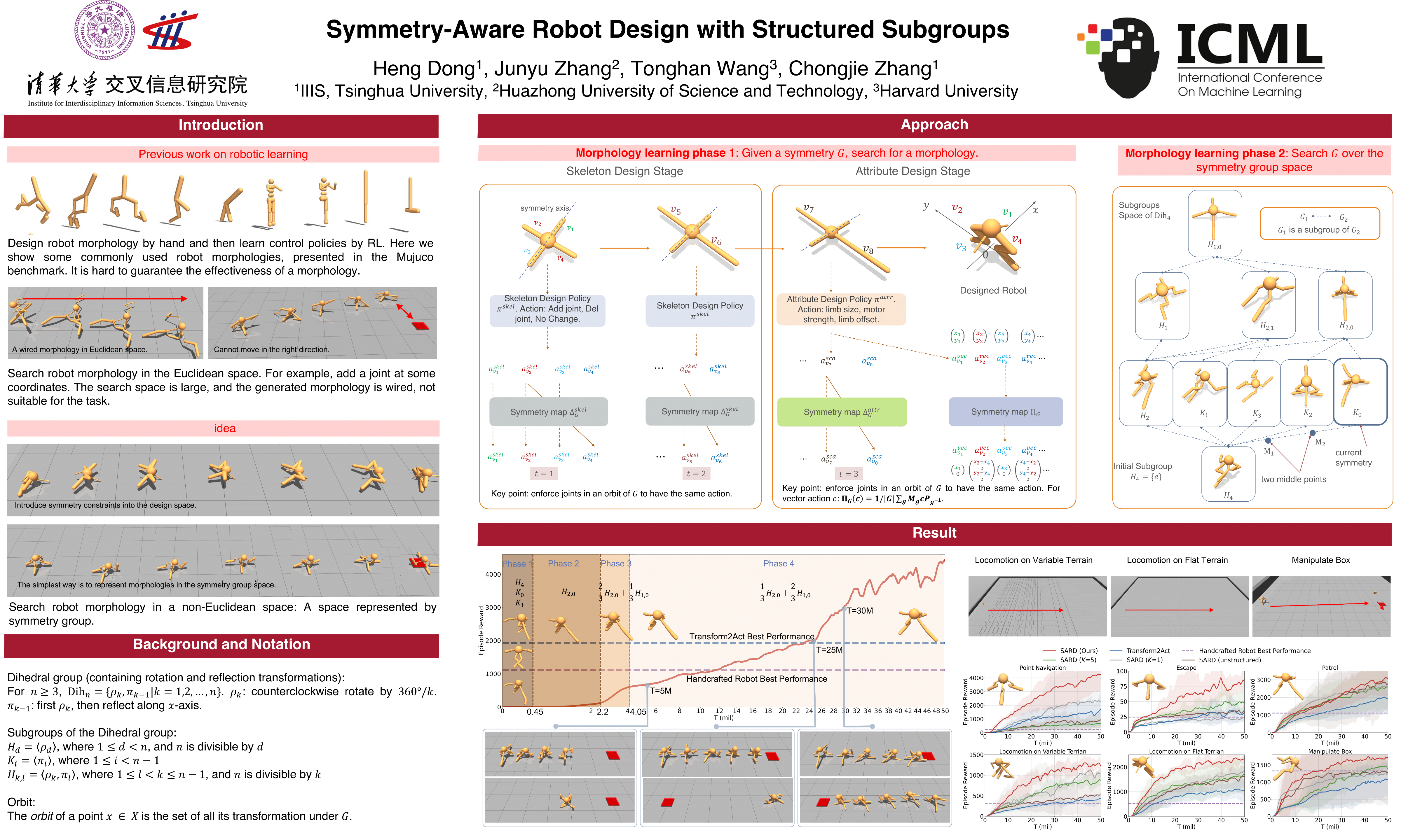
Robot design aims at learning to create robots that can be easily controlled and perform tasks efficiently. Previous works on robot design have proven its ability to generate robots for various tasks. However, these works searched the robots directly from the vast design space and ignored common structures, resulting in abnormal robots and poor performance. To tackle this problem, we propose a Symmetry-Aware Robot Design (SARD) framework that exploits the structure of the design space by incorporating symmetry searching into the robot design process. Specifically, we represent symmetries with the subgroups of the dihedral group and search for the optimal symmetry in structured subgroups. Then robots are designed under the searched symmetry. In this way, SARD can design efficient symmetric robots while covering the original design space, which is theoretically analyzed. We further empirically evaluate SARD on various tasks, and the results show its superior efficiency and generalizability.