Robust Situational Reinforcement Learning in Face of Context Disturbances
{kind=link}
Abstract
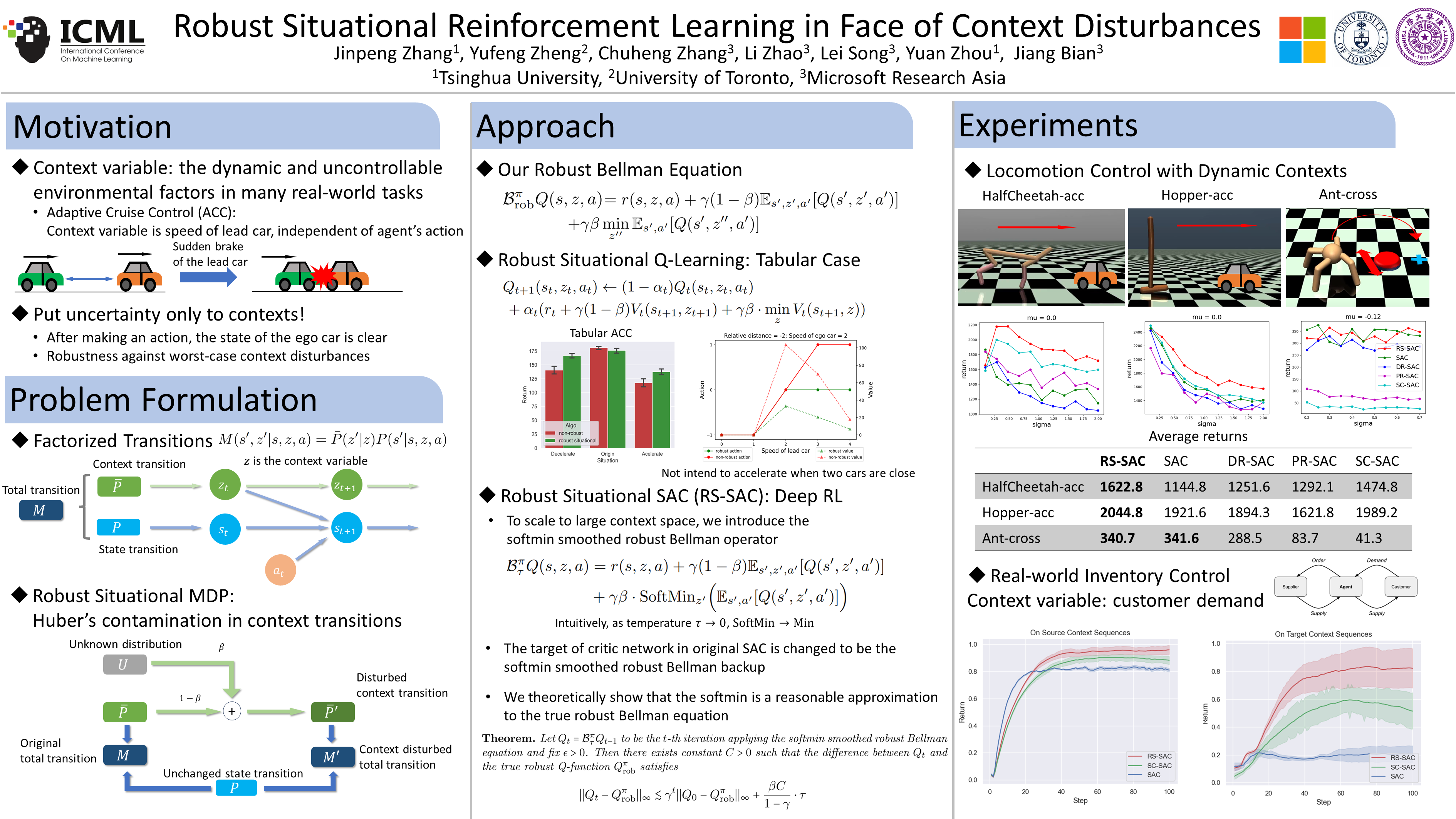
In many real-world tasks, some parts of state features, called contexts, are independent of action signals, e.g., customer demand in inventory control, speed of lead car in autonomous driving, etc. One of the challenges of reinforcement learning in these applications is that the true context transitions can be easily exposed some unknown source of contamination, leading to a shift of context transitions between source domains and target domains, which could cause performance degradation for RL algorithms. However, existing methods on robust RL aim at learning robust policies against the deviations of the entire system dynamics. To tackle this problem, this paper proposes the framework of robust situational Markov decision process (RS-MDP) which captures the possible deviations of context transitions explicitly. To scale to large context space, we introduce the softmin smoothed robust Bellman operator to learn the robust Q-value approximately, and apply our RS-MDP framework to existing RL algorithm SAC to learn the desired robust policies. We conduct experiments on several robot control tasks with dynamic contexts and inventory control tasks to demonstrate that our algorithm can generalize better and more robust against deviations of context transitions, and outperform existing robust RL algorithms.