EfficientZero V2: Mastering Discrete and Continuous Control with Limited Data
{kind=link}
Abstract
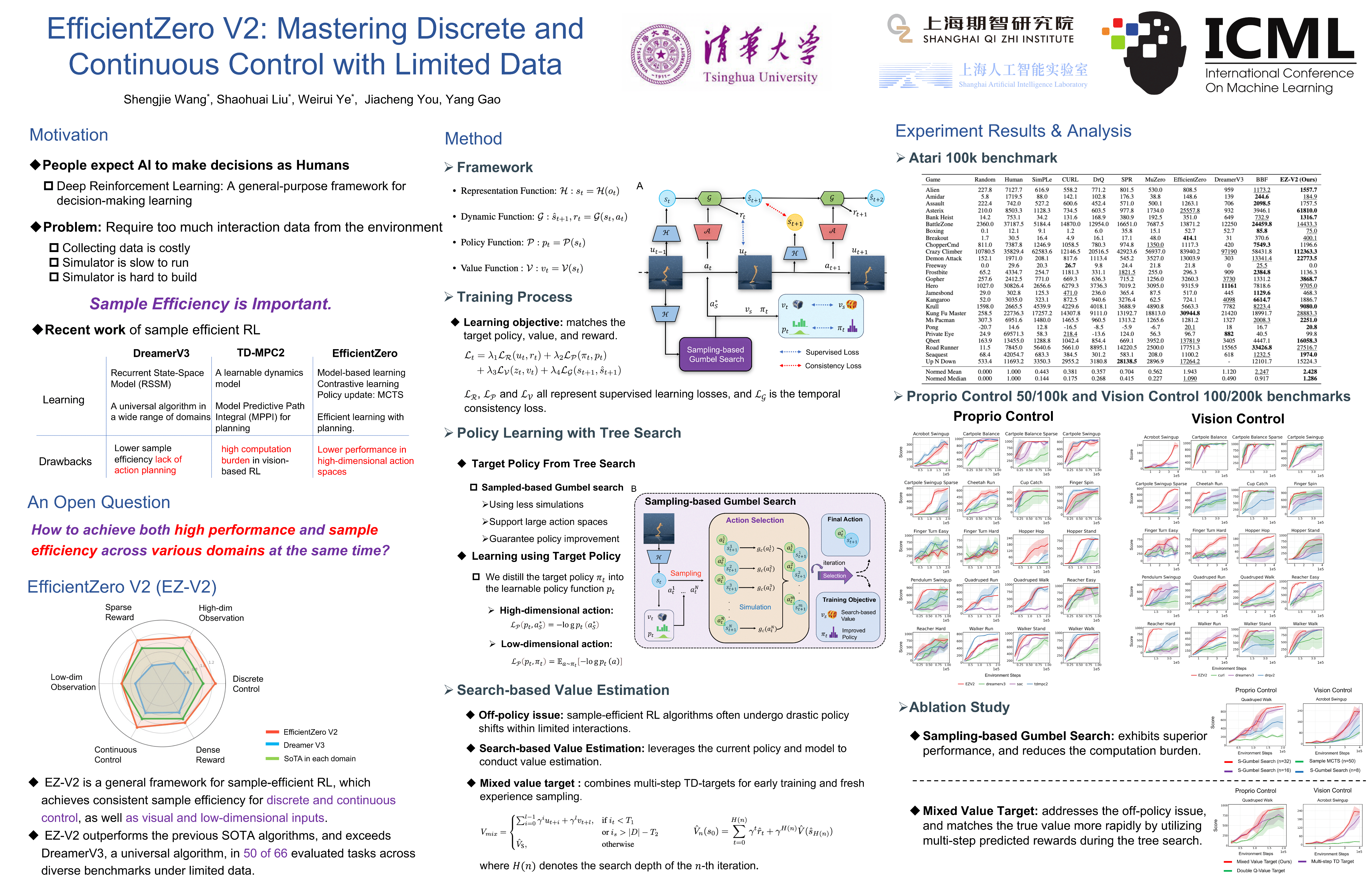
Sample efficiency remains a crucial challenge in applying Reinforcement Learning (RL) to real-world tasks. While recent algorithms have made significant strides in improving sample efficiency, none have achieved consistently superior performance across diverse domains. In this paper, we introduce EfficientZero V2, a general framework designed for sample-efficient RL algorithms. We have expanded the performance of EfficientZero to multiple domains, encompassing both continuous and discrete actions, as well as visual and low-dimensional inputs. With a series of improvements we propose, EfficientZero V2 outperforms the current state-of-the-art (SoTA) by a significant margin in diverse tasks under the limited data setting. EfficientZero V2 exhibits a notable advancement over the prevailing general algorithm, DreamerV3, achieving superior outcomes in 50 of 66 evaluated tasks across multiple benchmarks, including Atari 100k, Proprio Control, and Vision Control.