Nesting Particle Filters for Experimental Design in Dynamical Systems
Sahel Iqbal ⋅ Adrien Corenflos ⋅ Simo Särkkä ⋅ Hany Abdulsamad
2024 Poster
{kind=link}
Abstract
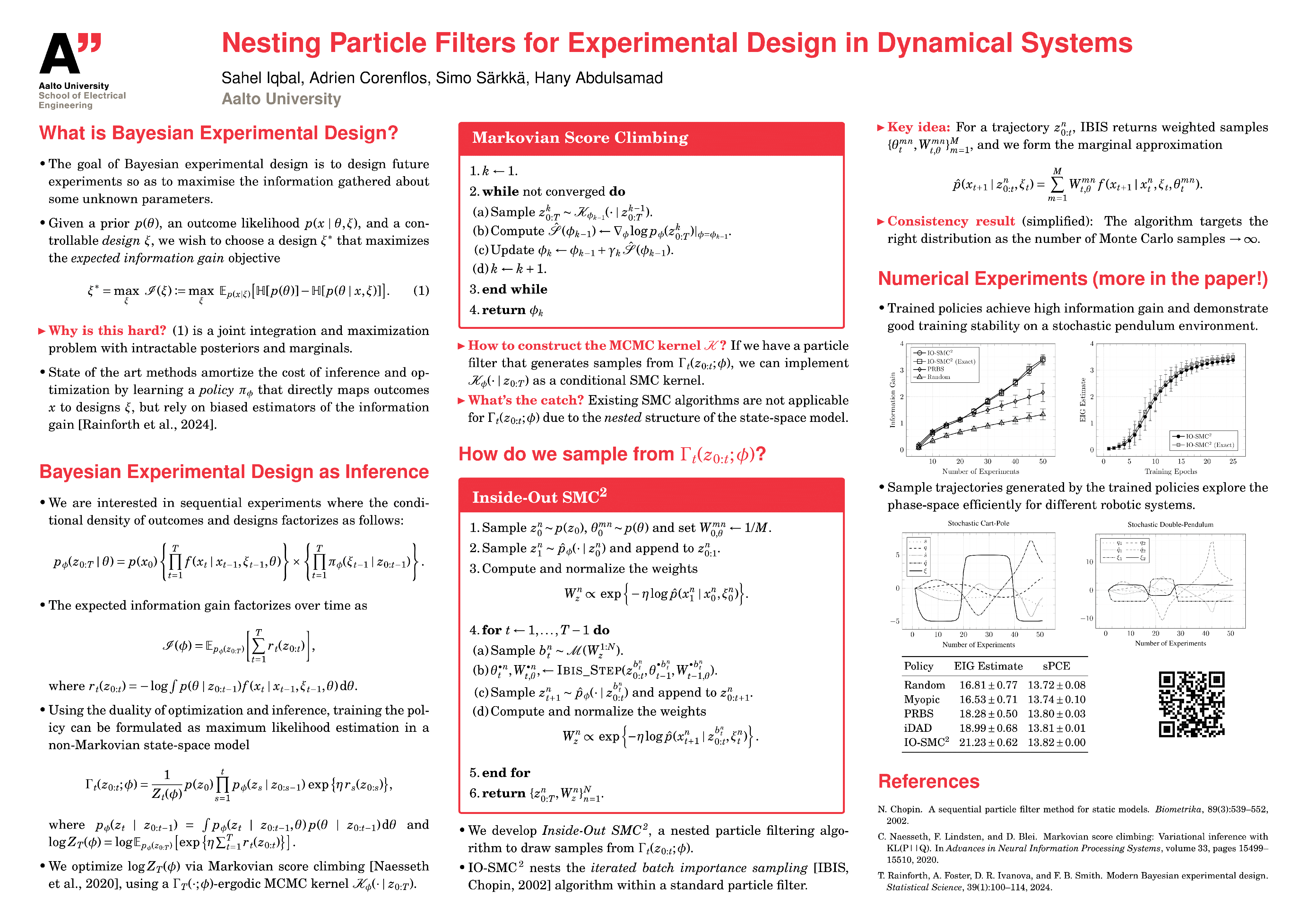
In this paper, we propose a novel approach to Bayesian experimental design for non-exchangeable data that formulates it as risk-sensitive policy optimization. We develop the Inside-Out SMC$^2$ algorithm, a nested sequential Monte Carlo technique to infer optimal designs, and embed it into a particle Markov chain Monte Carlo framework to perform gradient-based policy amortization. Our approach is distinct from other amortized experimental design techniques, as it does not rely on contrastive estimators. Numerical validation on a set of dynamical systems showcases the efficacy of our method in comparison to other state-of-the-art strategies.
Chat is not available.
Successful Page Load