Skill-Enhanced Reinforcement Learning Acceleration from Demonstrations
in
Workshop: Automated Reinforcement Learning: Exploring Meta-Learning, AutoML, and LLMs
{kind=link}
Abstract
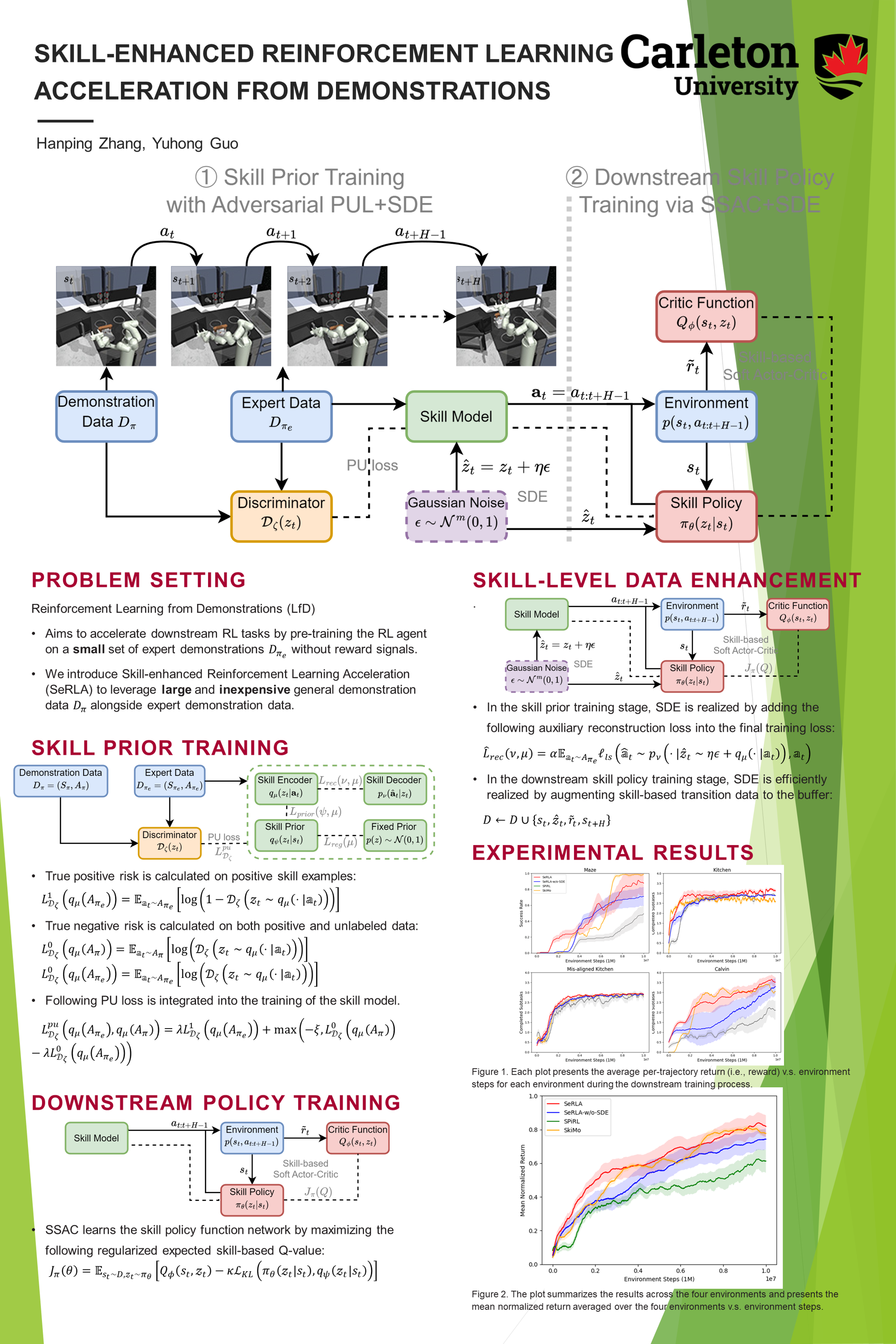
Learning from Demonstration (LfD) aims to facilitate rapid Reinforcement Learning (RL) by leveraging expert demonstrations to pre-train the RL agent. However, the limited availability of expert demonstration data often hinders its ability to effectively aid downstream RL learning. To address this problem, we propose a novel two-stage method dubbed as Skill-enhanced Reinforcement Learning Acceleration (SeRLA). SeRLA introduces a skill-level adversarial PU learning model to extract useful skill prior knowledge by enabling learning from both limited expert data and general low-cost demonstration data in the offline prior learning stage. Subsequently, it deploys a skill-based soft actor-critic algorithm to leverage this acquired prior knowledge in the downstream online RL stage for efficient training of a skill policy network. Moreover, we develop a simple skill-level data enhancement technique to further alleviate data sparsity and improve both skill prior learning and downstream skill policy training. Our experimental results on multiple standard RL environments show the proposed SeRLA method achieves state-of-the-art performance on accelerating reinforcement learning on downstream tasks, especially in the early learning phase.