Distortion and Uncertainty Aware Loss for Panoramic Depth Completion
{kind=link}
Abstract
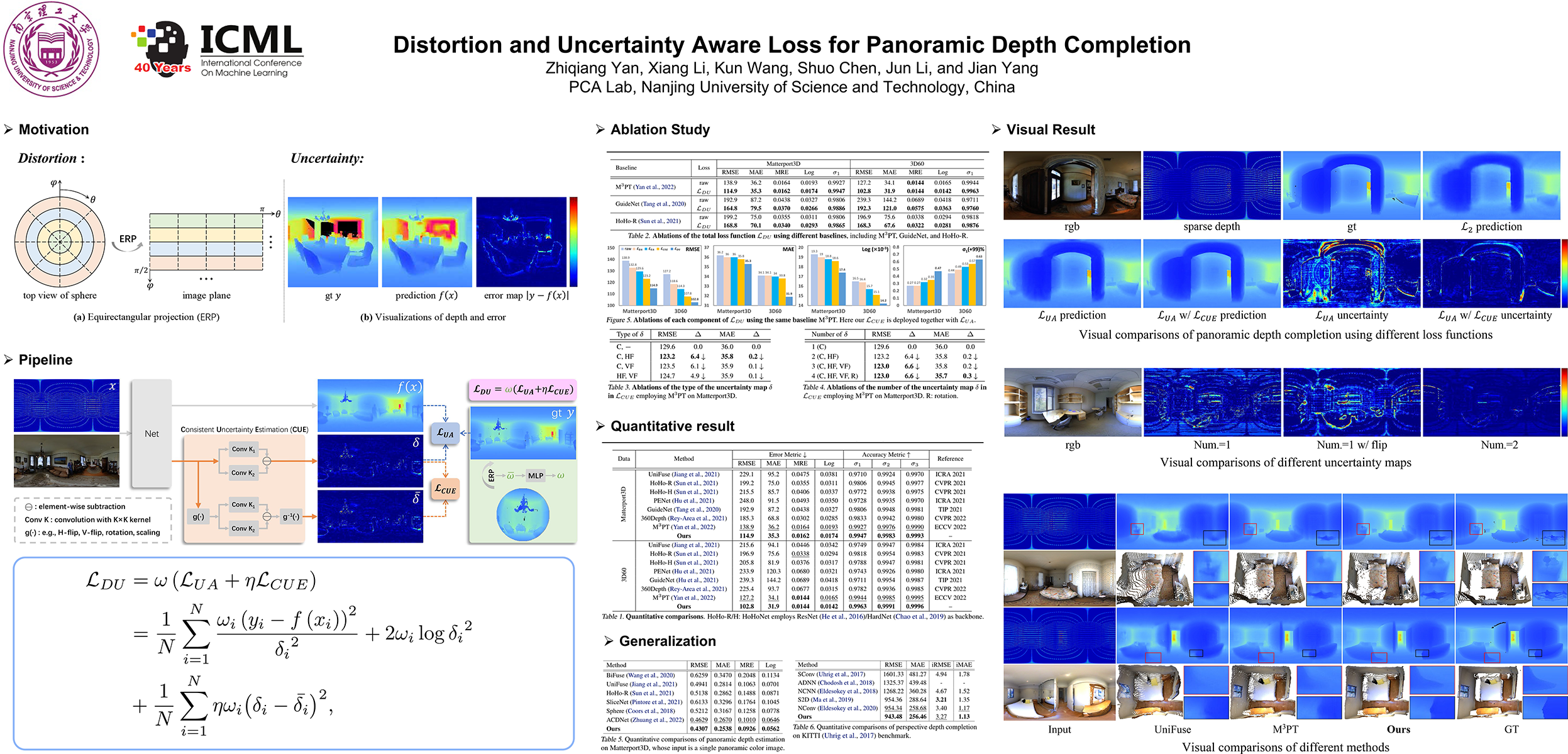
Standard MSE or MAE loss function is commonly used in limited field-of-vision depth completion, treating each pixel equally under a basic assumption that all pixels have same contribution during optimization. Recently, with the rapid rise of panoramic photography, panoramic depth completion (PDC) has raised increasing attention in 3D computer vision. However, the assumption is inapplicable to panoramic data due to its latitude-wise distortion and high uncertainty nearby textures and edges. To handle these challenges, we propose distortion and uncertainty aware loss (DUL) that consists of a distortion-aware loss and an uncertainty-aware loss. The distortion-aware loss is designed to tackle the panoramic distortion caused by equirectangular projection, whose coordinate transformation relation is used to adaptively calculate the weight of the latitude-wise distortion, distributing uneven importance instead of the equal treatment for each pixel. The uncertainty-aware loss is presented to handle the inaccuracy in non-smooth regions. Specifically, we characterize uncertainty into PDC solutions under Bayesian deep learning framework, where a novel consistent uncertainty estimation constraint is designed to learn the consistency between multiple uncertainty maps of a single panorama. This consistency constraint allows model to produce more precise uncertainty estimation that is robust to feature deformation. Extensive experiments show the superiority of our method over standard loss functions, reaching the state of the art.