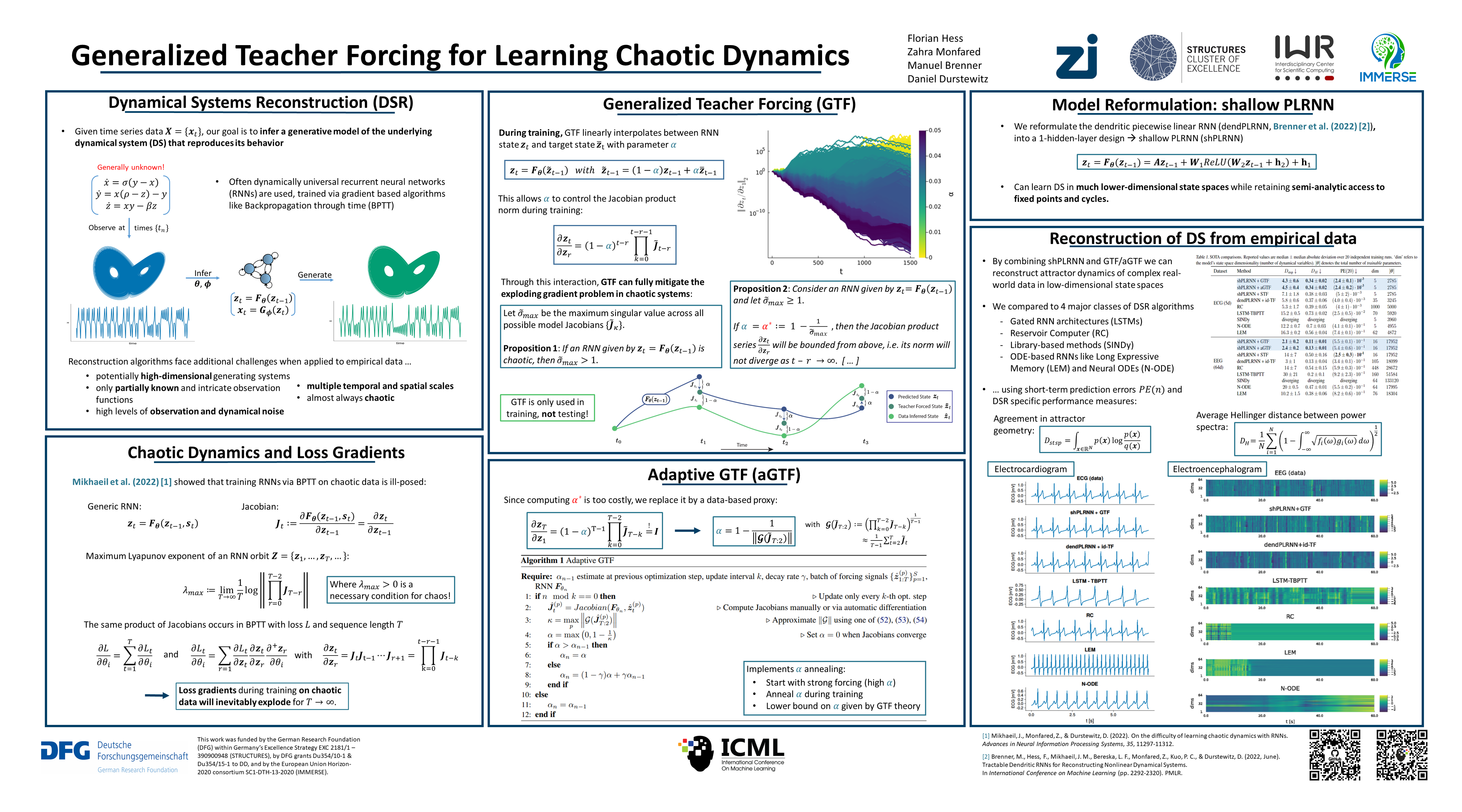
Generalized Teacher Forcing for Learning Chaotic Dynamics
{kind=link}
Abstract
Chaotic dynamical systems (DS) are ubiquitous in nature and society. Often we are interested in reconstructing such systems from observed time series for prediction or mechanistic insight, where by reconstruction we mean learning geometrical and invariant temporal properties of the system in question (like attractors). However, training reconstruction algorithms like recurrent neural networks (RNNs) on such systems by gradient-descent based techniques faces severe challenges. This is mainly due to exploding gradients caused by the exponential divergence of trajectories in chaotic systems. Moreover, for (scientific) interpretability we wish to have as low dimensional reconstructions as possible, preferably in a model which is mathematically tractable. Here we report that a surprisingly simple modification of teacher forcing leads to provably strictly all-time bounded gradients in training on chaotic systems, and, when paired with a simple architectural rearrangement of a tractable RNN design, piecewise-linear RNNs (PLRNNs), allows for faithful reconstruction in spaces of at most the dimensionality of the observed system. We show on several DS that with these amendments we can reconstruct DS better than current SOTA algorithms, in much lower dimensions. Performance differences were particularly compelling on real world data with which most other methods severely struggled. This work thus led to a simple yet powerful DS reconstruction algorithm which is highly interpretable at the same time.