Attention-Based Recurrence for Multi-Agent Reinforcement Learning under Stochastic Partial Observability
{kind=link}
Abstract
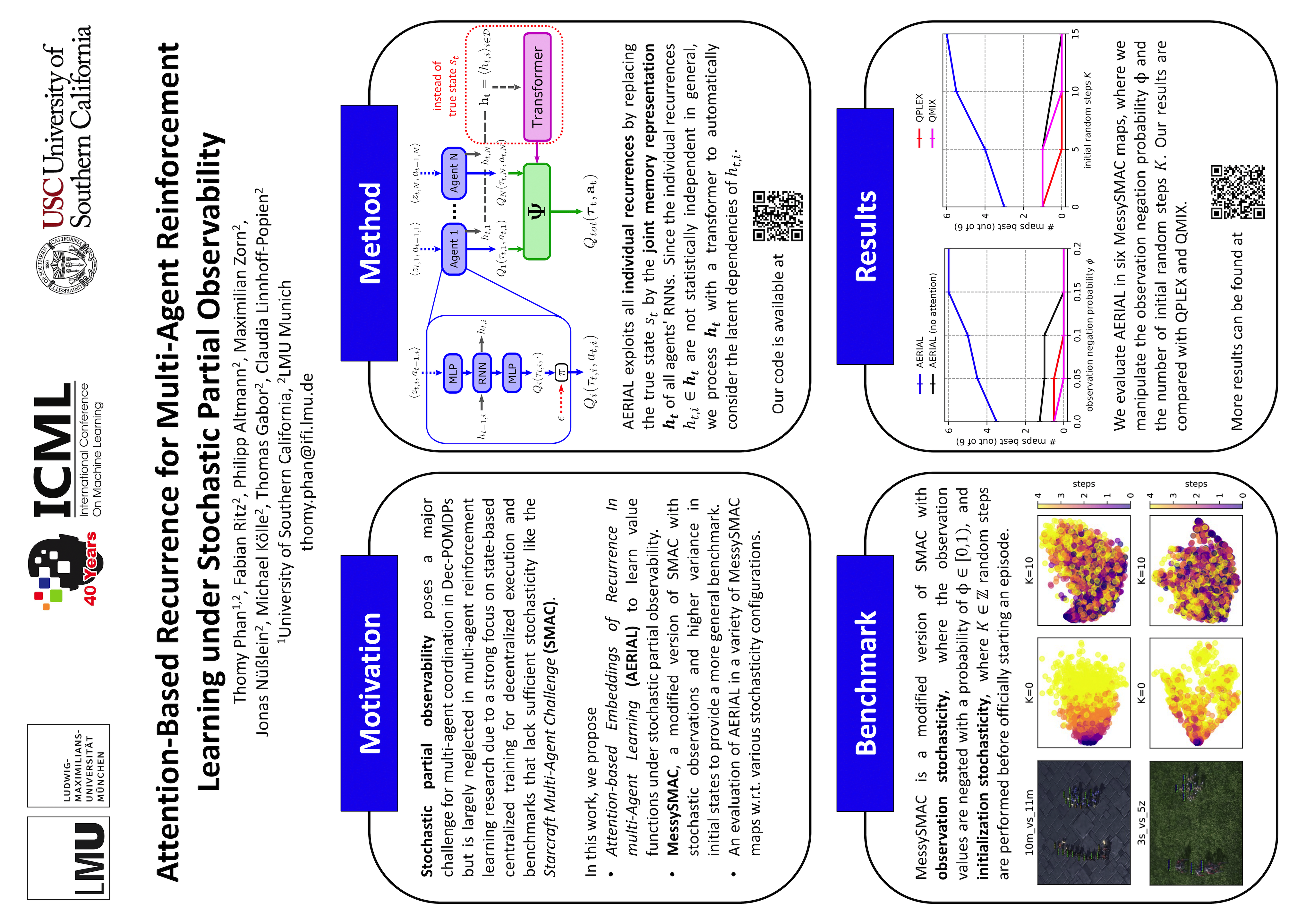
Stochastic partial observability poses a major challenge for decentralized coordination in multi-agent reinforcement learning but is largely neglected in state-of-the-art research due to a strong focus on state-based centralized training for decentralized execution (CTDE) and benchmarks that lack sufficient stochasticity like StarCraft Multi-Agent Challenge (SMAC). In this paper, we propose Attention-based Embeddings of Recurrence In multi-Agent Learning (AERIAL) to approximate value functions under stochastic partial observability. AERIAL replaces the true state with a learned representation of multi-agent recurrence, considering more accurate information about decentralized agent decisions than state-based CTDE. We then introduce MessySMAC, a modified version of SMAC with stochastic observations and higher variance in initial states, to provide a more general and configurable benchmark regarding stochastic partial observability. We evaluate AERIAL in Dec-Tiger as well as in a variety of SMAC and MessySMAC maps, and compare the results with state-based CTDE. Furthermore, we evaluate the robustness of AERIAL and state-based CTDE against various stochasticity configurations in MessySMAC.