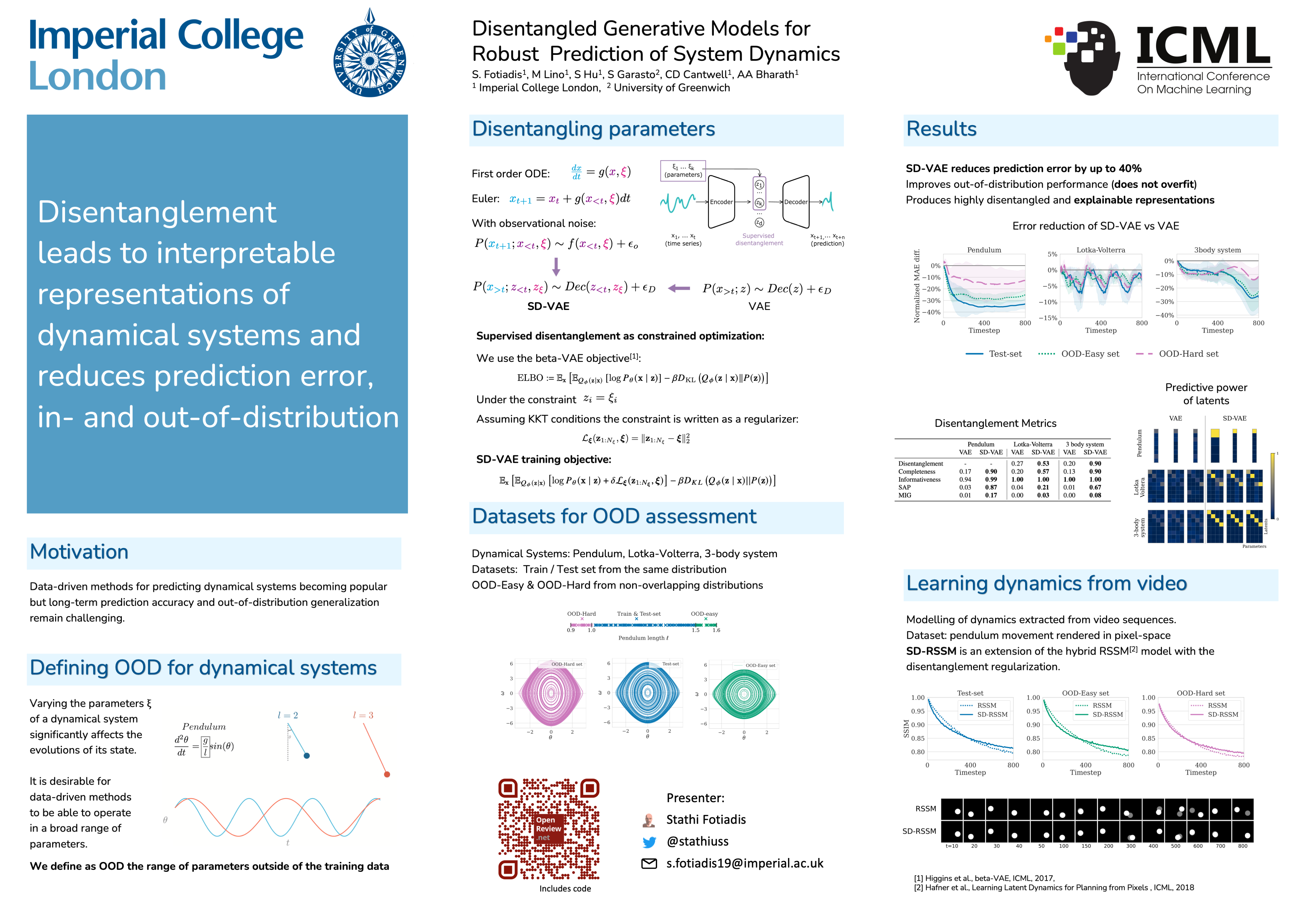
Disentangled Generative Models for Robust Prediction of System Dynamics
Stathi Fotiadis ⋅ Mario Lino ⋅ Shunlong Hu ⋅ Stef Garasto ⋅ Chris Cantwell ⋅ Anil Bharath
2023 Poster
{kind=link}
Abstract
The use of deep neural networks for modelling system dynamics is increasingly popular, but long-term prediction accuracy and out-of-distribution generalization still present challenges. In this study, we address these challenges by considering the parameters of dynamical systems as factors of variation of the data and leverage their ground-truth values to disentangle the representations learned by generative models. Our experimental results in phase-space and observation-space dynamics, demonstrate the effectiveness of latent-space supervision in producing disentangled representations, leading to improved long-term prediction accuracy and out-of-distribution robustness.
Video
Chat is not available.
Successful Page Load