Meta-learning Parameterized Skills
Haotian Fu ⋅ Shangqun Yu ⋅ Saket Tiwari ⋅ Michael L. Littman ⋅ George Konidaris
2023 Poster
{kind=link}
Abstract
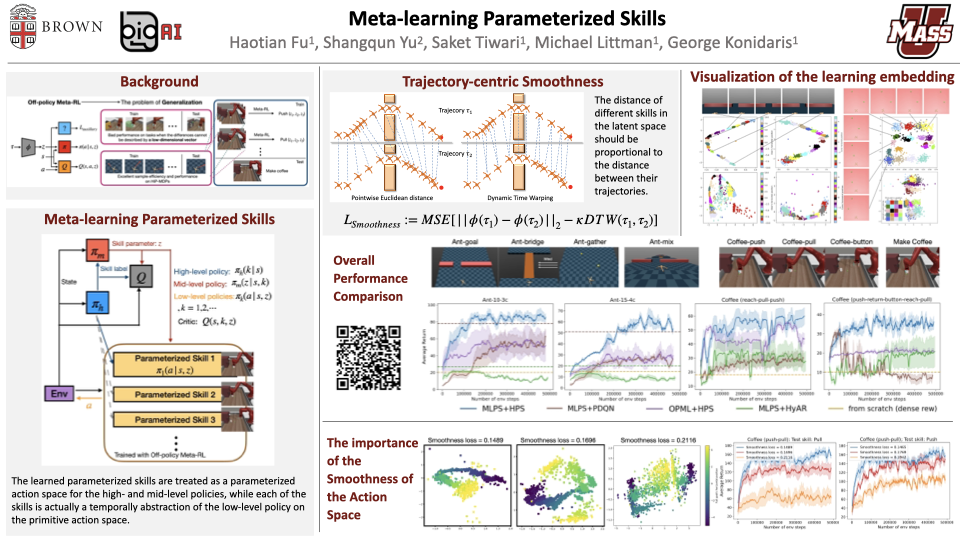
We propose a novel parameterized skill-learning algorithm that aims to learn transferable parameterized skills and synthesize them into a new action space that supports efficient learning in long-horizon tasks. We propose to leverage off-policy Meta-RL combined with a trajectory-centric smoothness term to learn a set of parameterized skills. Our agent can use these learned skills to construct a three-level hierarchical framework that models a Temporally-extended Parameterized Action Markov Decision Process. We empirically demonstrate that the proposed algorithms enable an agent to solve a set of highly difficult long-horizon (obstacle-course and robot manipulation) tasks.
Video
Chat is not available.
Successful Page Load