Multi-Agent Best Arm Identification with Private Communications
Alexandre Rio ⋅ Merwan Barlier ⋅ Igor Colin ⋅ Marta Soare
2023 Poster
{kind=link}
Abstract
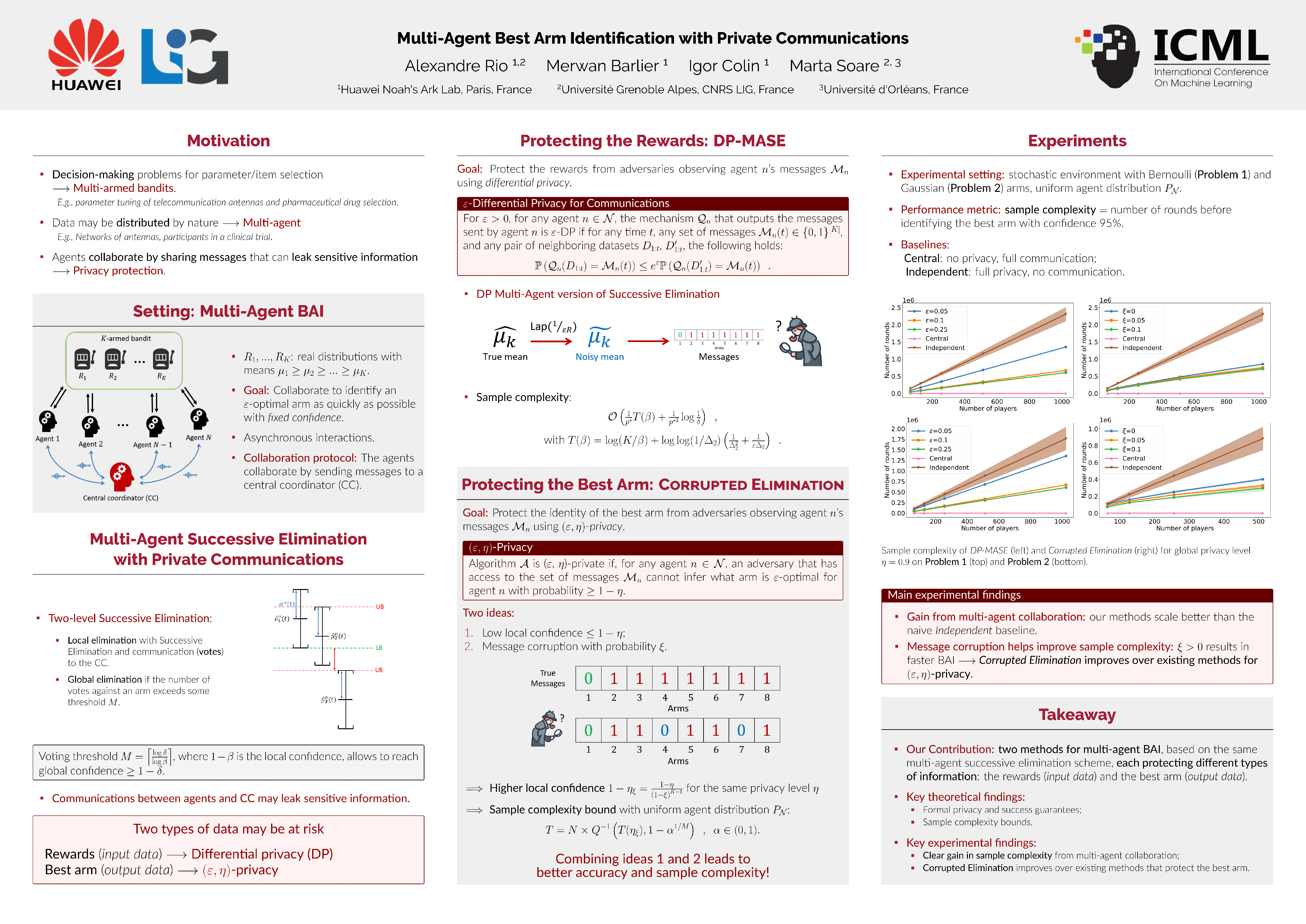
We address multi-agent best arm identification with privacy guarantees. In this setting, agents collaborate by communicating to find the optimal arm. To avoid leaking sensitive data through messages, we consider two notions of privacy withholding different kinds of information: differential privacy and $(\epsilon, \eta)$-privacy. For each privacy definition, we propose an algorithm based on a two-level successive elimination scheme. We provide theoretical guarantees for the privacy level, accuracy and sample complexity of our algorithms. Experiments on various settings support our theoretical findings.
Video
Chat is not available.
Successful Page Load