Efficient RL via Disentangled Environment and Agent Representations
Kevin Gmelin ⋅ Shikhar Bahl ⋅ Russell Mendonca ⋅ Deepak Pathak
2023 Poster
{kind=link}
Abstract
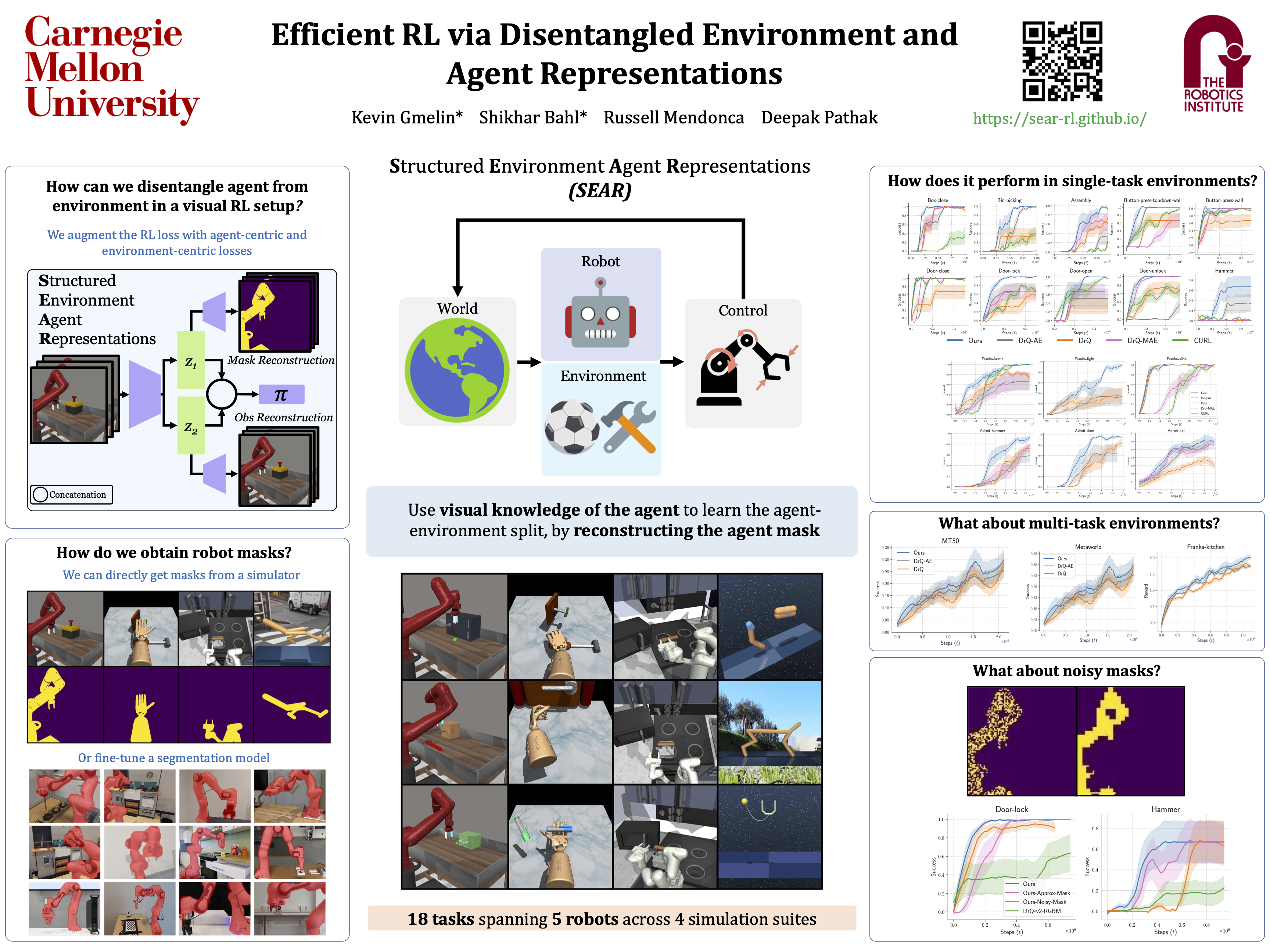
Agents that are aware of the separation between the environments and themselves can leverage this understanding to form effective representations of visual input. We propose an approach for learning such structured representations for RL algorithms, using visual knowledge of the agent, which is often inexpensive to obtain, such as its shape or mask. This is incorporated into the RL objective using a simple auxiliary loss. We show that our method, SEAR (Structured Environment-Agent Representations), outperforms state-of-the-art model-free approaches over 18 different challenging visual simulation environments spanning 5 different robots.
Video
Chat is not available.
Successful Page Load