Best Arm Identification in Multi-Agent Multi-Armed Bandits
Filippo Vannella ⋅ Alexandre Proutiere ⋅ Jaeseong Jeong
2023 Poster
{kind=link}
Abstract
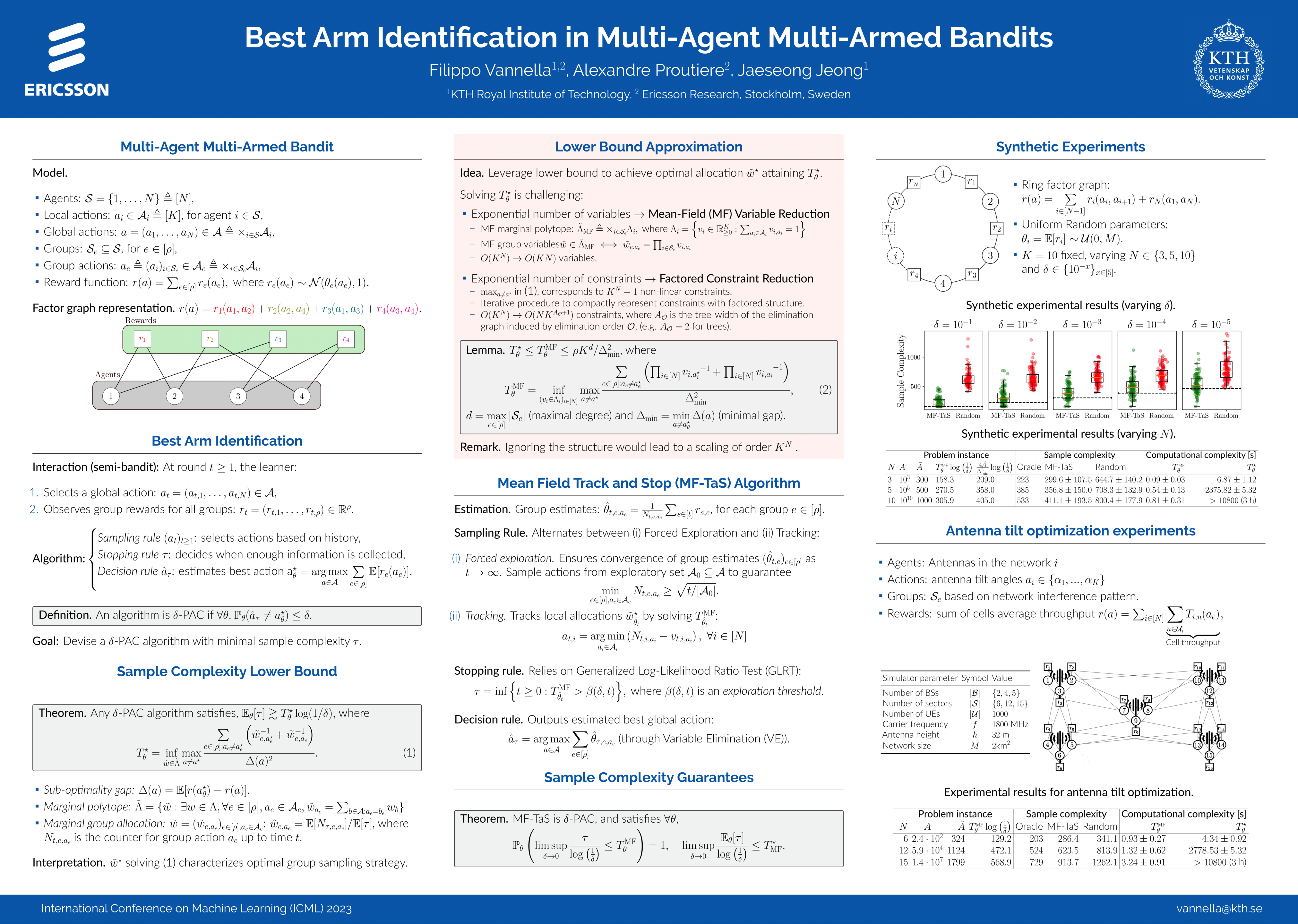
We investigate the problem of best arm identification in Multi-Agent Multi-Armed Bandits (MAMABs) where the rewards are defined through a factor graph. The objective is to find an optimal global action with a prescribed level of confidence and minimal sample complexity. We derive a tight instance-specific lower bound of the sample complexity and characterize the corresponding optimal sampling strategy. Unfortunately, this bound is obtained by solving a combinatorial optimization problem with a number of variables and constraints exponentially growing with the number of agents. We leverage Mean Field (MF) techniques to obtain, in a computationally efficient manner, an approximation of the lower bound. The approximation scales at most as $\rho K^d$ (where $\rho$, $K$, and $d$ denote the number of factors in the graph, the number of possible actions per agent, and the maximal degree of the factor graph). We devise MF-TaS (Mean-Field-Track-and-Stop), an algorithm whose sample complexity provably matches our approximated lower bound. We illustrate the performance of MF-TaS numerically using both synthetic and real-world experiments (e.g., to solve the antenna tilt optimization problem in radio communication networks).
Video
Chat is not available.
Successful Page Load