MyoDex: A Generalizable Prior for Dexterous Manipulation
{kind=link}
Abstract
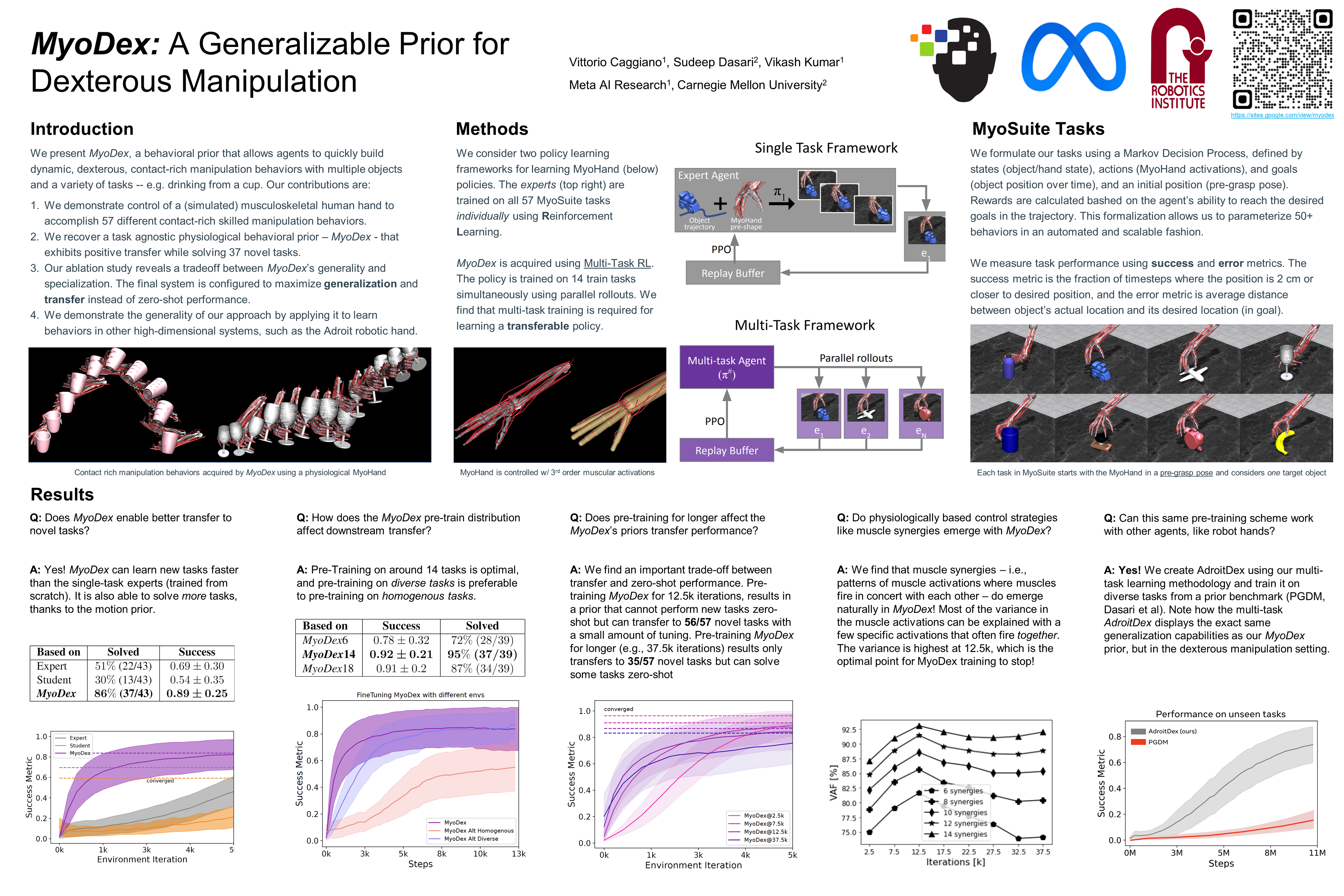
Human dexterity is a hallmark of motor control behaviors. Our hands can rapidly synthesize new behaviors despite the complexity (multi-articular and multi-joints, with 23 joints controlled by more than 40 muscles) of mosculoskeletal control. In this work, we take inspiration from how human dexterity builds on a diversity of prior experiences, instead of being acquired through a single task. Motivated by this observation, we set out to develop agents that can build upon previous experience to quickly acquire new (previously unattainable) behaviors. Specifically, our approach leverages multi-task learning to implicitly capture a task-agnostic behavioral priors (MyoDex) for human-like dexterity, using a physiologically realistic human hand model -- MyoHand. We demonstrate MyoDex's effectiveness in few-shot generalization as well as positive transfer to a large repertoire of unseen dexterous manipulation tasks. MyoDex can solve approximately 3x more tasks and it can accelerate the achievement of solutions by about 4x in comparison to a distillation baseline. While prior work has synthesized single musculoskeletal control behaviors, MyoDex is the first generalizable manipulation prior that catalyzes the learning of dexterous physiological control across a large variety of contact-rich behaviors.