Global optimality for Euclidean CCCP under Riemannian convexity
{kind=link}
Abstract
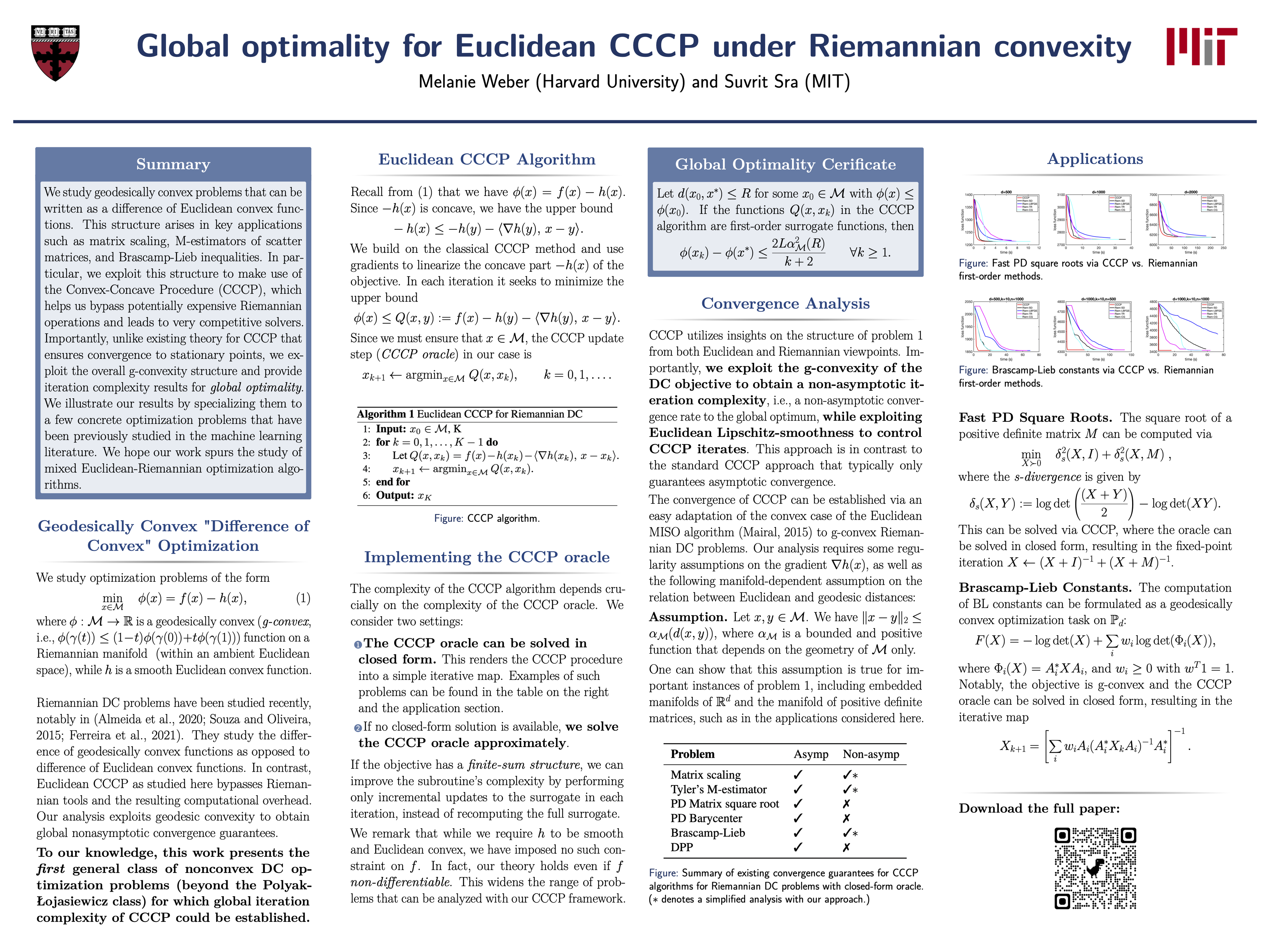
We study geodesically convex (g-convex) problems that can be written as a difference of Euclidean convex functions. This structure arises in key applications such as matrix scaling, M- estimators of scatter matrices, and Brascamp-Lieb inequalities. In particular, we exploit this structure to make use of the Convex-Concave Procedure (CCCP), which helps us bypass potentially expensive Riemannian operations and leads to very competitive solvers. Importantly, unlike existing theory for CCCP that ensures convergence to stationary points, we exploit the overall g-convexity structure and provide iteration complexity results for global optimality. We illustrate our results by specializing them to a few concrete optimization problems that have been previously studied in the machine learning literature. We hope our work spurs the study of mixed Euclidean-Riemannian optimization algorithms.