Masked Trajectory Models for Prediction, Representation, and Control
{kind=link}
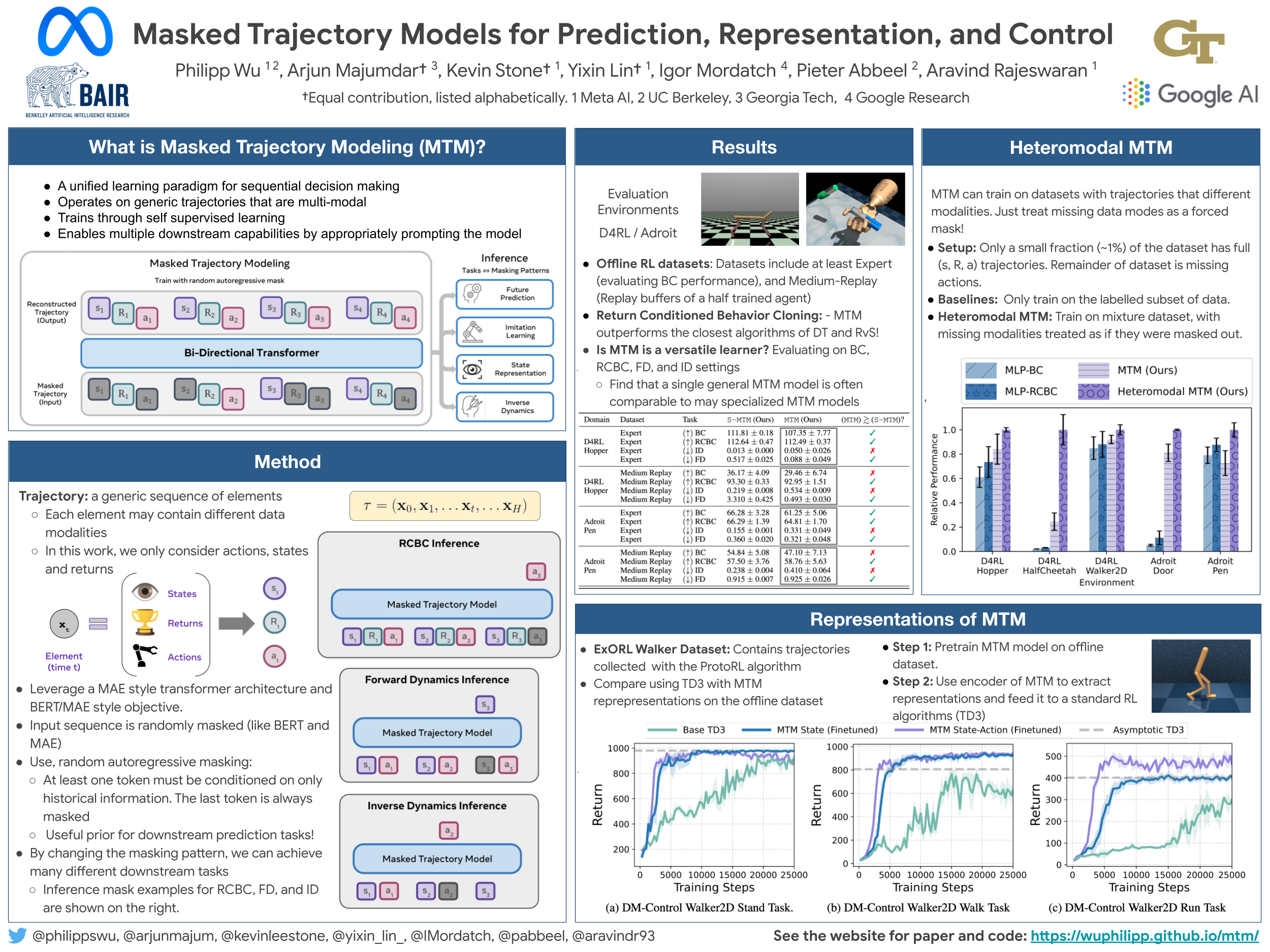
Abstract
We introduce Masked Trajectory Models (MTM) as a generic abstraction for sequential decision making. MTM takes a trajectory, such as a state-action sequence, and aims to reconstruct the trajectory conditioned on random subsets of the same trajectory. By training with a highly randomized masking pattern, MTM learns versatile networks that can take on different roles or capabilities, by simply choosing appropriate masks at inference time. For example, the same MTM network can be used as a forward dynamics model, inverse dynamics model, or even an offline RL agent. Through extensive experiments in several continuous control tasks, we show that the same MTM network -- i.e. same weights -- can match or outperform specialized networks trained for the aforementioned capabilities. Additionally, we find that state representations learned by MTM can significantly accelerate the learning speed of traditional RL algorithms. Finally, in offline RL benchmarks, we find that MTM is competitive with specialized offline RL algorithms, despite MTM being a generic self-supervised learning method without any explicit RL components. Code is available at https://github.com/facebookresearch/mtm.