One-shot Imitation in a Non-Stationary Environment via Multi-Modal Skill
{kind=link}
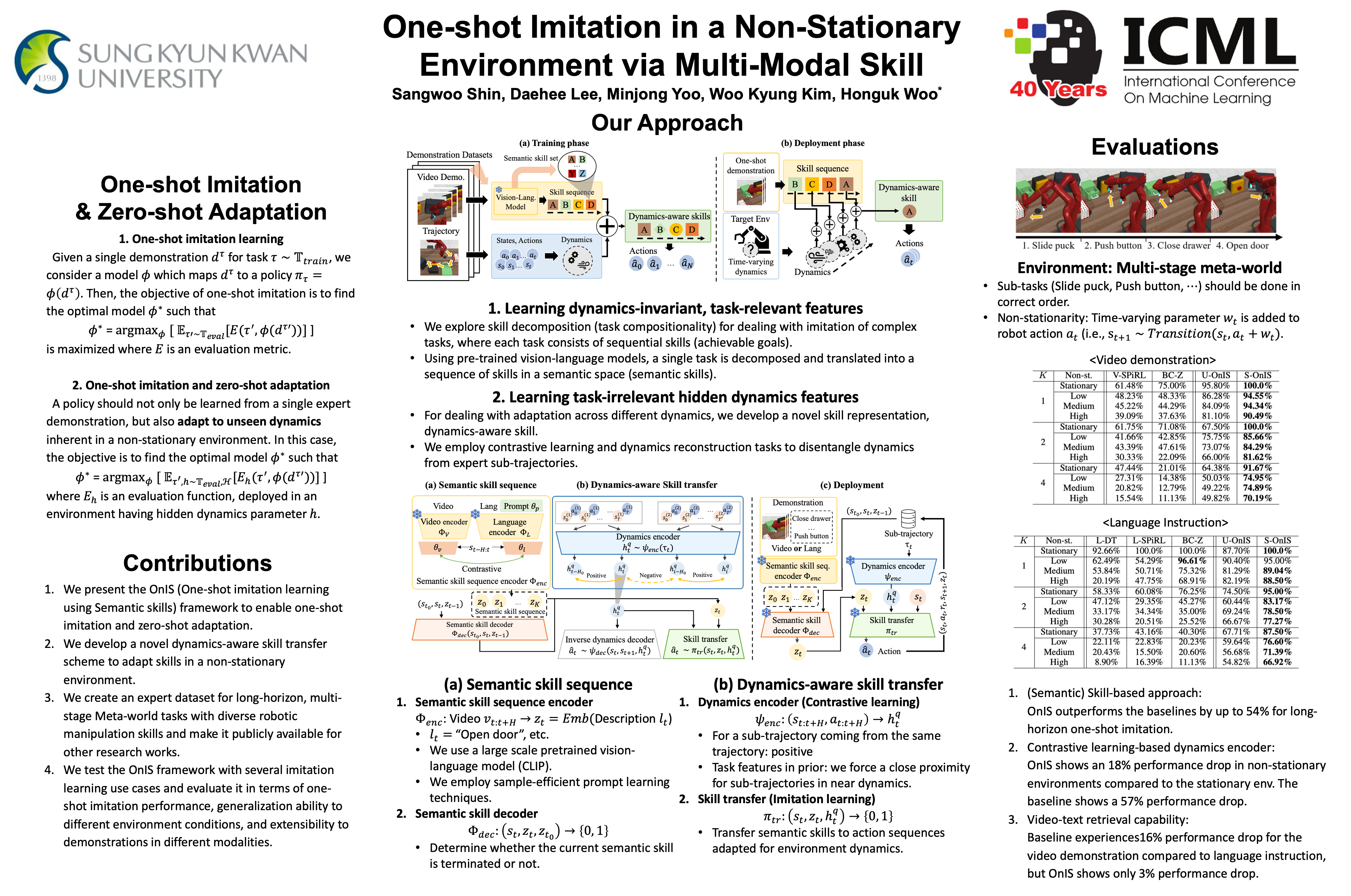
Abstract
One-shot imitation is to learn a new task from a single demonstration, yet it is a challenging problem to adopt it for complex tasks with the high domain diversity inherent in a non-stationary environment. To tackle the problem, we explore the compositionality of complex tasks, and present a novel skill-based imitation learning framework enabling one-shot imitation and zero-shot adaptation; from a single demonstration for a complex unseen task, a semantic skill sequence is inferred and then each skill in the sequence is converted into an action sequence optimized for environmental hidden dynamics that can vary over time. Specifically, we leverage a vision-language model to learn a semantic skill set from offline video datasets, where each skill is represented on the vision-language embedding space, and adapt meta-learning with dynamics inference to enable zero-shot skill adaptation. We evaluate our framework with various one-shot imitation scenarios for extended multi-stage Meta-world tasks, showing its superiority in learning complex tasks, generalizing to dynamics changes, and extending to different demonstration conditions and modalities, compared to other baselines.