Modular Hierarchical Reinforcement Learning for Robotics: Improving Scalability and Generalizability
{kind=link}
Abstract
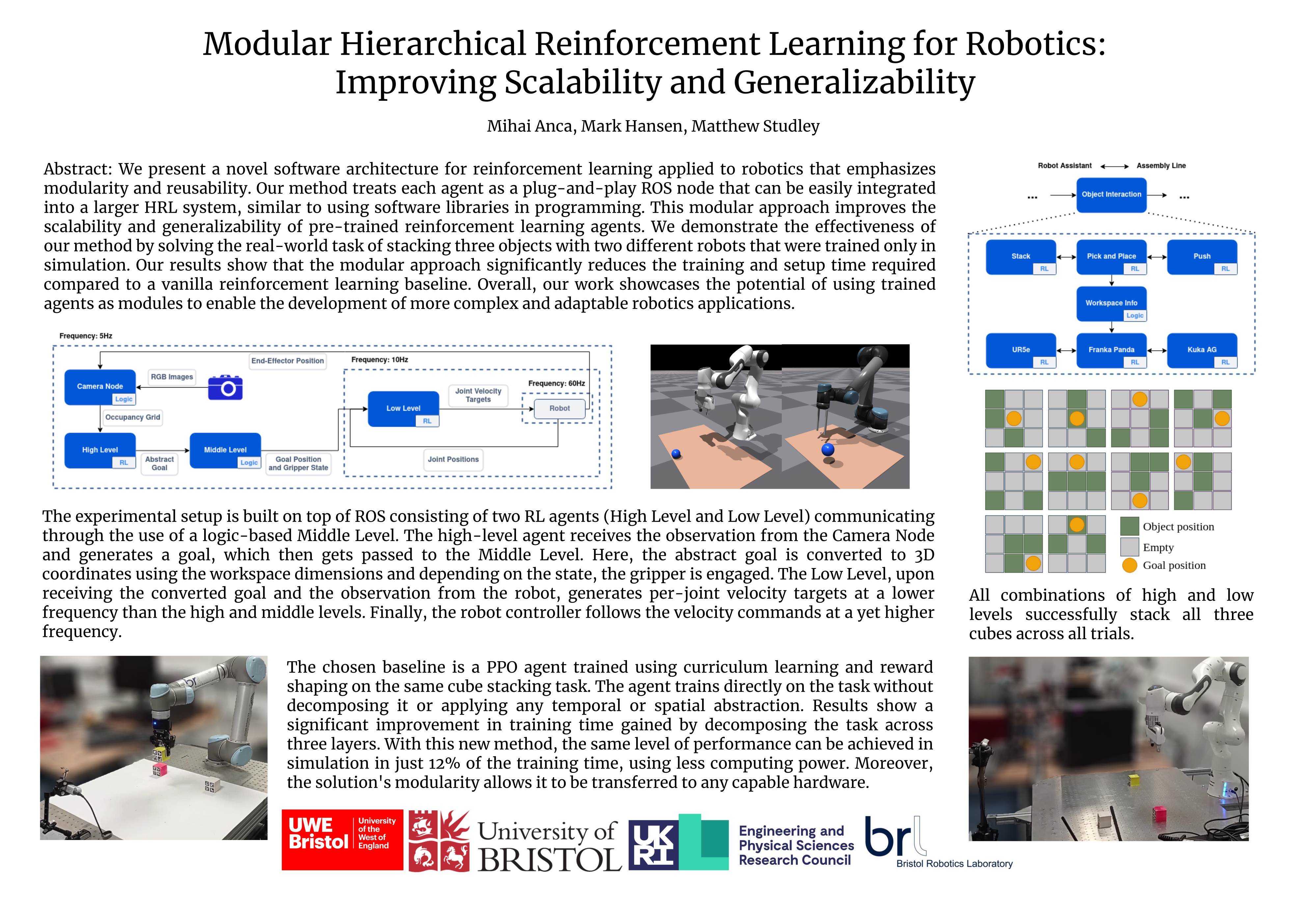
We present a novel software architecture for reinforcement learning applied to robotics that emphasizes modularity and reusability. Our method treats each agent as a plug-and-play ROS node that can be easily integrated into a larger HRL system, similar to using software libraries in programming. This modular approach improves the scalability and generalizability of pre-trained reinforcement learning agents. We demonstrate the effectiveness of our method by solving the real-world task of stacking three objects with two different robots that were trained only in simulation. Our results show that the modular approach significantly reduces the training and setup time required compared to a vanilla reinforcement learning baseline. Overall, our work showcases the potential of using trained agents as modules to enable the development of more complex and adaptable robotics applications.