Neural Inverse Kinematic
Raphael Bensadoun ⋅ Shir Gur ⋅ Nitsan Blau ⋅ Lior Wolf
2022 Poster
{kind=link}
Abstract
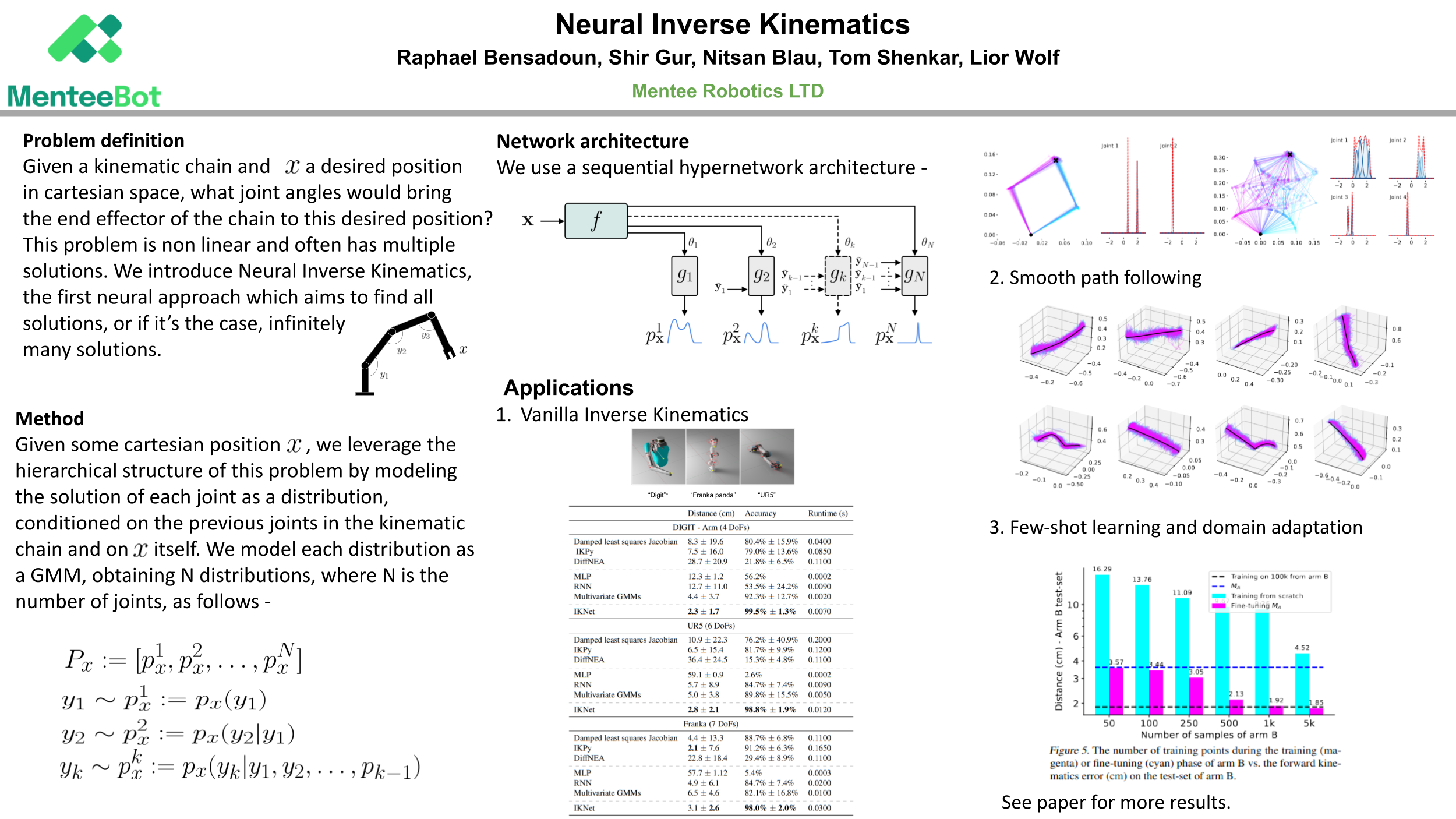
Inverse kinematic (IK) methods recover the parameters of the joints, given the desired position of selected elements in the kinematic chain. While the problem is well-defined and low-dimensional, it has to be solved rapidly, accounting for multiple possible solutions. In this work, we propose a neural IK method that employs the hierarchical structure of the problem to sequentially sample valid joint angles conditioned on the desired position and on the preceding joints along the chain. In our solution, a hypernetwork $f$ recovers the parameters of multiple primary networks {$g_1,g_2,\dots,g_N$, where $N$ is the number of joints}, such that each $g_i$ outputs a distribution of possible joint angles, and is conditioned on the sampled values obtained from the previous primary networks $g_j, j
Chat is not available.
Successful Page Load