CtrlFormer: Learning Transferable State Representation for Visual Control via Transformer
{kind=link}
Abstract
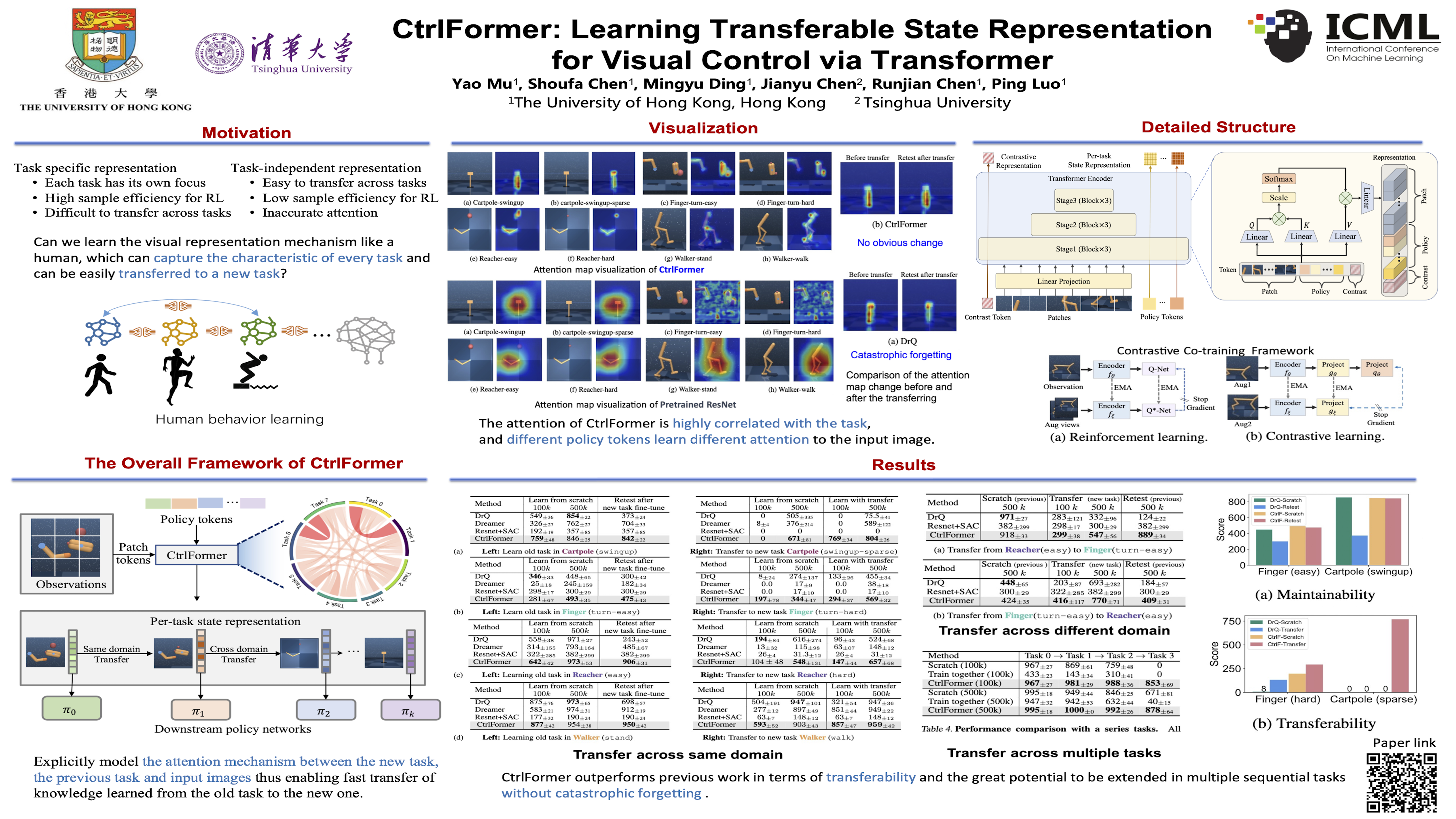
Transformer has achieved great successes in learning vision and language representation, which is general across various downstream tasks. In visual control, learning transferable state representation that can transfer between different control tasks is important to reduce the training sample size. However, porting Transformer to sample-efficient visual control remains a challenging and unsolved problem.To this end, we propose a novel Control Transformer (CtrlFormer), possessing many appealing benefits that prior arts do not have. Firstly, CtrlFormer jointly learns self-attention mechanisms between visual tokens and policy tokens among different control tasks, where multitask representation can be learned and transferred without catastrophic forgetting. Secondly, we carefully design a contrastive reinforcement learning paradigm to train CtrlFormer, enabling it to achieve high sample efficiency, which is important in control problems. For example, in the DMControl benchmark, unlike recent advanced methods that failed by producing a zero score in the ``Cartpole'' task after transfer learning with 100k samples, CtrlFormer can achieve a state-of-the-art score with only 100k samples while maintaining the performance of previous tasks. The code and models are released in our project homepage.