Phasic Self-Imitative Reduction for Sparse-Reward Goal-Conditioned Reinforcement Learning
{kind=link}
Abstract
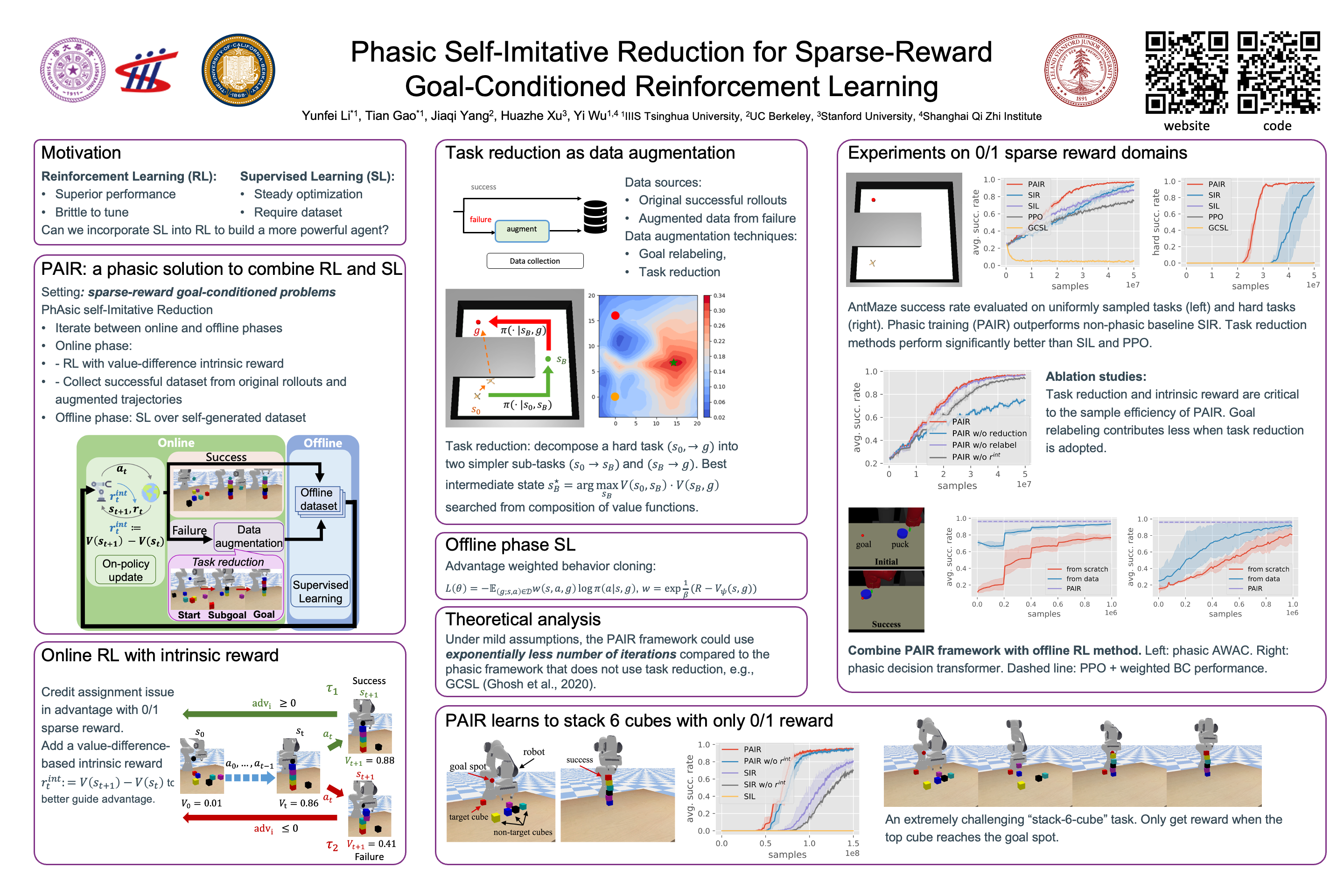
It has been a recent trend to leverage the power of supervised learning (SL) towards more effective reinforcement learning (RL) methods. We propose a novel phasic solution by alternating online RL and offline SL for tackling sparse-reward goal-conditioned problems. In the online phase, we perform RL training and collect rollout data while in the offline phase, we perform SL on those successful trajectories from the dataset. To further improve sample efficiency, we adopt additional techniques in the online phase including task reduction to generate more feasible trajectories and a value-difference-based intrinsic reward to alleviate the sparse-reward issue. We call this overall framework, PhAsic self-Imitative Reduction (PAIR). PAIR is compatible with various online and offline RL methods and substantially outperforms both non-phasic RL and phasic SL baselines on sparse-reward robotic control problems, including a particularly challenging stacking task. PAIR is the first RL method that learns to stack 6 cubes with only 0/1 success rewards from scratch.