N-Penetrate: Active Learning of Neural Collision Handler for Complex 3D Mesh Deformations
{kind=link}
Abstract
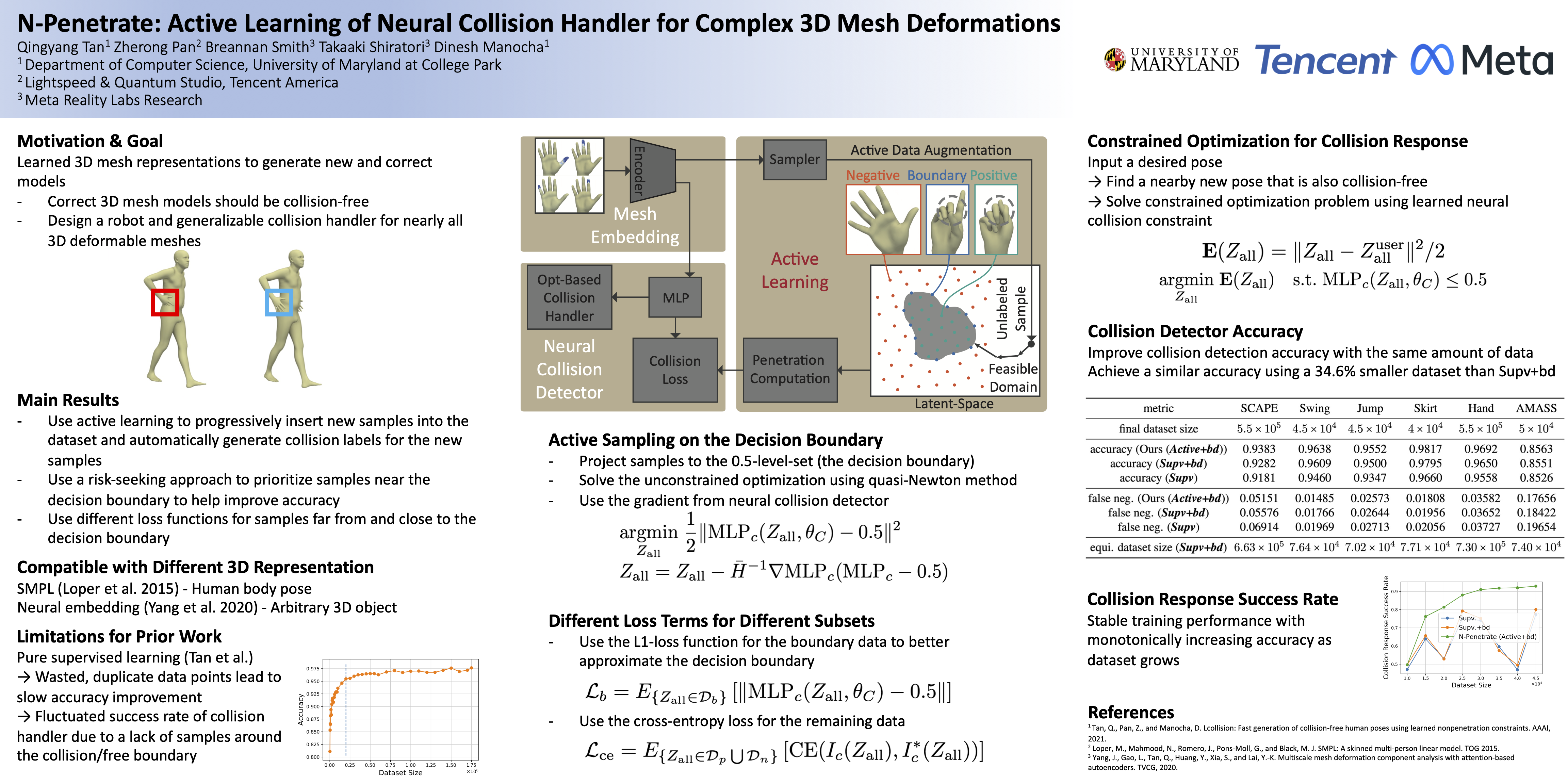
We present a robust learning algorithm to detect and handle collisions in 3D deforming meshes. We first train a neural network to detect collisions and then use a numerical optimization algorithm to resolve penetrations guided by the network. Our learned collision handler can resolve collisions for unseen, high-dimensional meshes with thousands of vertices. To obtain stable network performance in such large and unseen spaces, we apply active learning by progressively inserting new collision data based on the network inferences. We automatically label these new data using an analytical collision detector and progressively fine-tune our detection networks. We evaluate our method for collision handling of complex, 3D meshes coming from several datasets with different shapes and topologies, including datasets corresponding to dressed and undressed human poses, cloth simulations, and human hand poses acquired using multi-view capture systems.