Sample-Efficient Reinforcement Learning with loglog(T) Switching Cost
Dan Qiao ⋅ Ming Yin ⋅ Ming Min ⋅ Yu-Xiang Wang
2022 Poster
{kind=link}
Abstract
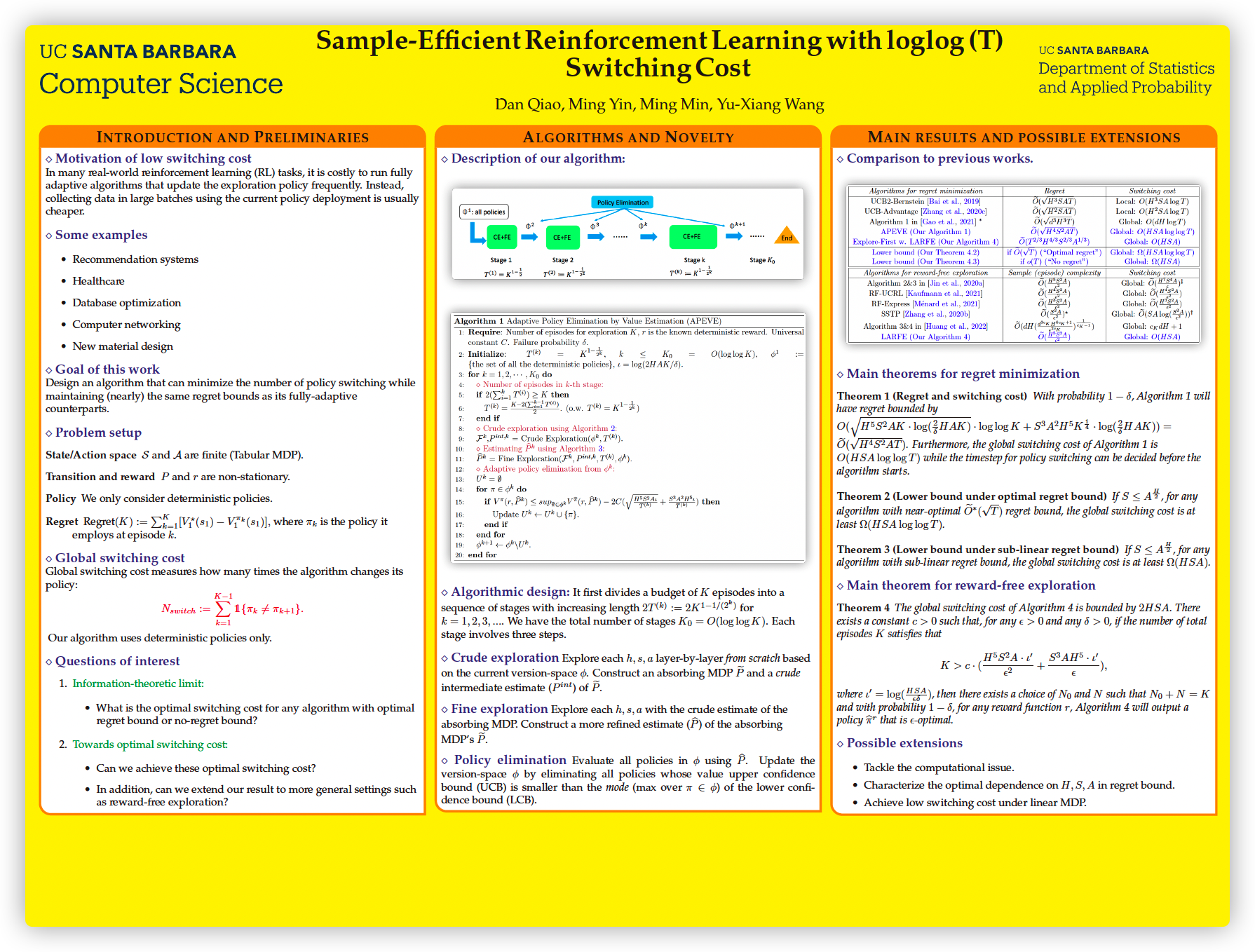
We study the problem of reinforcement learning (RL) with low (policy) switching cost — a problem well-motivated by real-life RL applications in which deployments of new policies are costly and the number of policy updates must be low. In this paper, we propose a new algorithm based on stage-wise exploration and adaptive policy elimination that achieves a regret of $\widetilde{O}(\sqrt{H^4S^2AT})$ while requiring a switching cost of $O(HSA \log\log T)$. This is an exponential improvement over the best-known switching cost $O(H^2SA\log T)$ among existing methods with $\widetilde{O}(\mathrm{poly}(H,S,A)\sqrt{T})$ regret. In the above, $S,A$ denotes the number of states and actions in an $H$-horizon episodic Markov Decision Process model with unknown transitions, and $T$ is the number of steps. As a byproduct of our new techniques, we also derive a reward-free exploration algorithm with a switching cost of $O(HSA)$. Furthermore, we prove a pair of information-theoretical lower bounds which say that (1) Any no-regret algorithm must have a switching cost of $\Omega(HSA)$; (2) Any $\widetilde{O}(\sqrt{T})$ regret algorithm must incur a switching cost of $\Omega(HSA\log\log T)$. Both our algorithms are thus optimal in their switching costs.
Chat is not available.
Successful Page Load