Nearly Optimal Policy Optimization with Stable at Any Time Guarantee
Tianhao Wu ⋅ Yunchang Yang ⋅ Han Zhong ⋅ Liwei Wang ⋅ Simon Du ⋅ Jiantao Jiao
Keywords:
T: Reinforcement Learning and Planning
2022 Poster
{kind=link}
Abstract
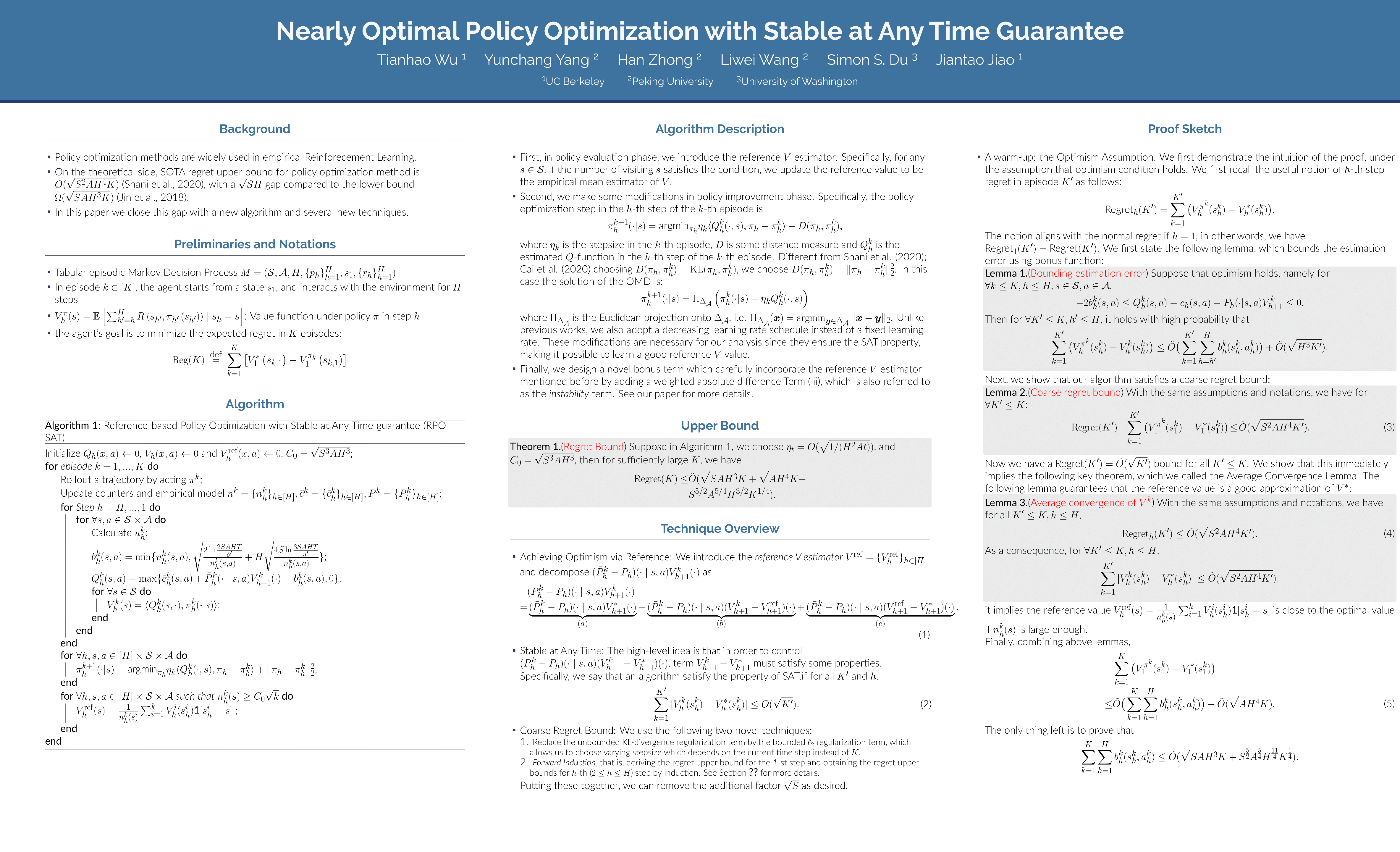
Policy optimization methods are one of the most widely used classes of Reinforcement Learning (RL) algorithms. However, theoretical understanding of these methods remains insufficient. Even in the episodic (time-inhomogeneous) tabular setting, the state-of-the-art theoretical result of policy-based method in Shani et al. (2020) is only $\tilde{O}(\sqrt{S^2AH^4K})$ where $S$ is the number of states, $A$ is the number of actions, $H$ is the horizon, and $K$ is the number of episodes, and there is a $\sqrt{SH}$ gap compared with the information theoretic lower bound $\tilde{\Omega}(\sqrt{SAH^3K})$ (Jin et al., 2018). To bridge such a gap, we propose a novel algorithm Reference-based Policy Optimization with Stable at Any Time guarantee (RPO-SAT), which features the property ``Stable at Any Time''. We prove that our algorithm achieves $\tilde{O}(\sqrt{SAH^3K} + \sqrt{AH^4K})$ regret. When $S > H$, our algorithm is minimax optimal when ignoring logarithmic factors. To our best knowledge, RPO-SAT is the first computationally efficient, nearly minimax optimal policy-based algorithm for tabular RL.
Chat is not available.
Successful Page Load