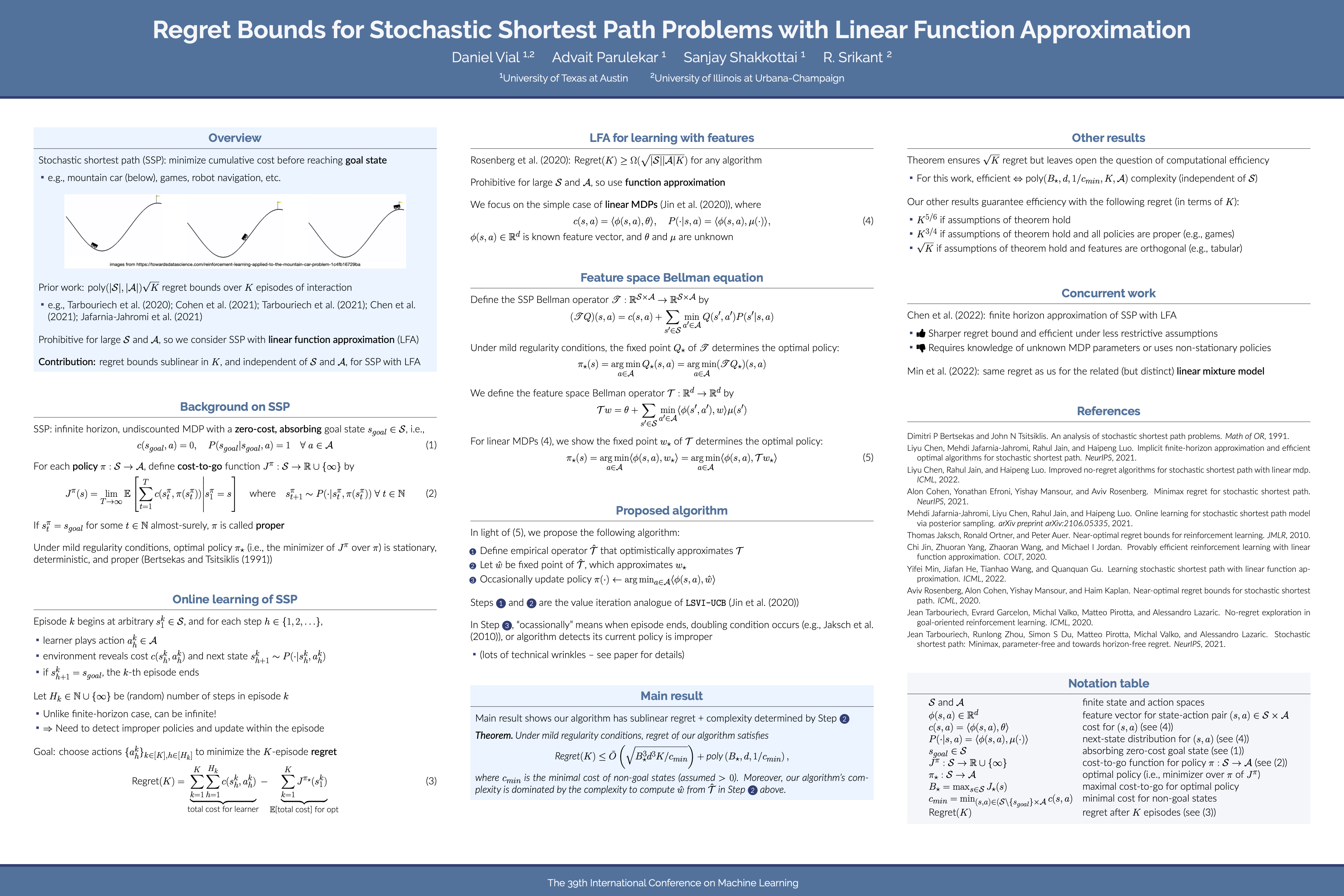
Regret Bounds for Stochastic Shortest Path Problems with Linear Function Approximation
Daniel Vial ⋅ Advait Parulekar ⋅ Sanjay Shakkottai ⋅ R Srikant
Keywords:
T: Reinforcement Learning and Planning
2022 Poster
{kind=link}
Abstract
We propose an algorithm that uses linear function approximation (LFA) for stochastic shortest path (SSP). Under minimal assumptions, it obtains sublinear regret, is computationally efficient, and uses stationary policies. To our knowledge, this is the first such algorithm in the LFA literature (for SSP or other formulations). Our algorithm is a special case of a more general one, which achieves regret square root in the number of episodes given access to a computation oracle.
Chat is not available.
Successful Page Load