The Importance of Non-Markovianity in Maximum State Entropy Exploration
 Outstanding Paper
Outstanding Paper
{kind=link}
Abstract
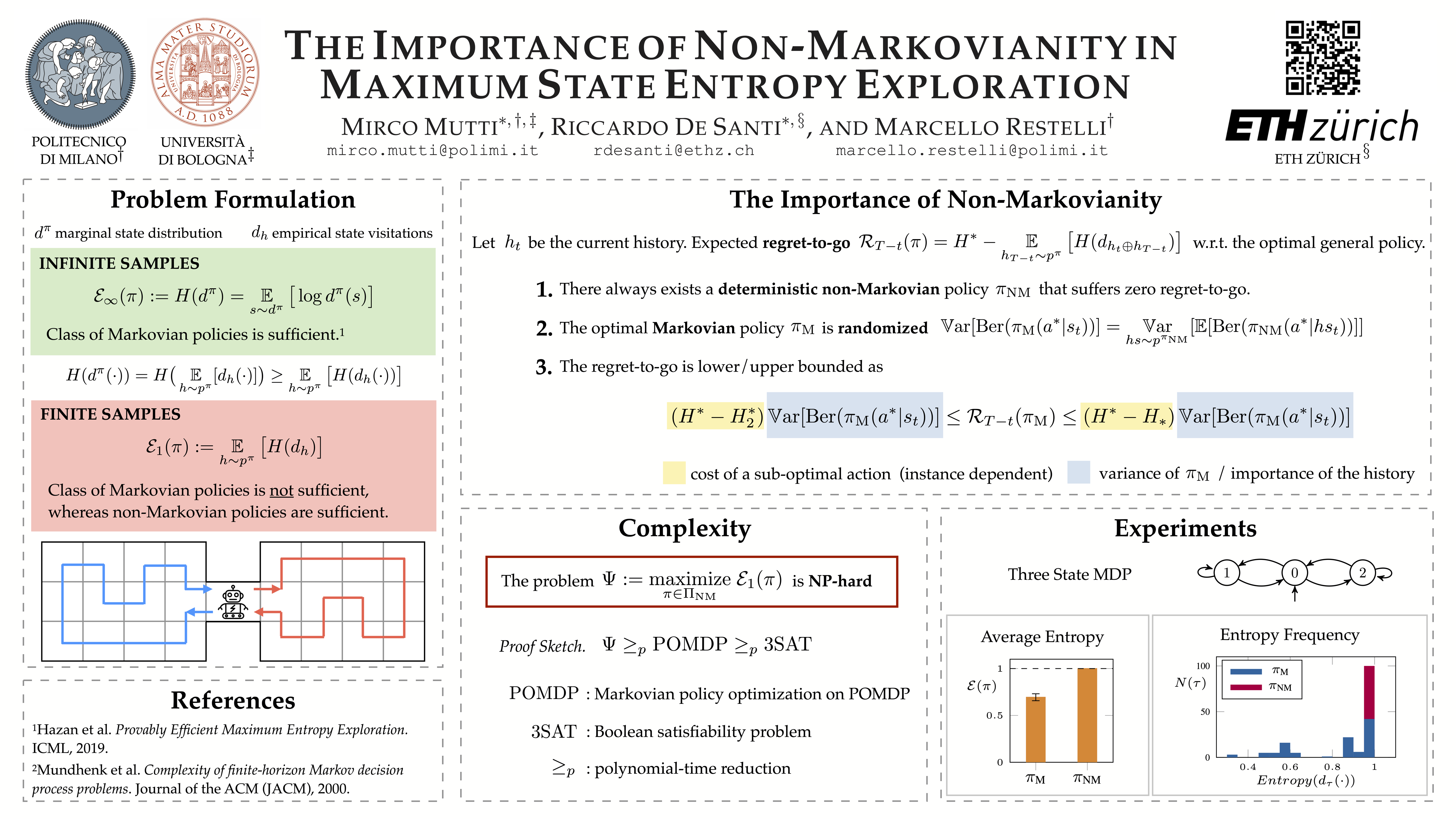
In the maximum state entropy exploration framework, an agent interacts with a reward-free environment to learn a policy that maximizes the entropy of the expected state visitations it is inducing. Hazan et al. (2019) noted that the class of Markovian stochastic policies is sufficient for the maximum state entropy objective, and exploiting non-Markovianity is generally considered pointless in this setting. In this paper, we argue that non-Markovianity is instead paramount for maximum state entropy exploration in a finite-sample regime. Especially, we recast the objective to target the expected entropy of the induced state visitations in a single trial. Then, we show that the class of non-Markovian deterministic policies is sufficient for the introduced objective, while Markovian policies suffer non-zero regret in general. However, we prove that the problem of finding an optimal non-Markovian policy is NP-hard. Despite this negative result, we discuss avenues to address the problem in a tractable way and how non-Markovian exploration could benefit the sample efficiency of online reinforcement learning in future works.