Challenging Common Assumptions in Convex Reinforcement Learning
{kind=link}
Abstract
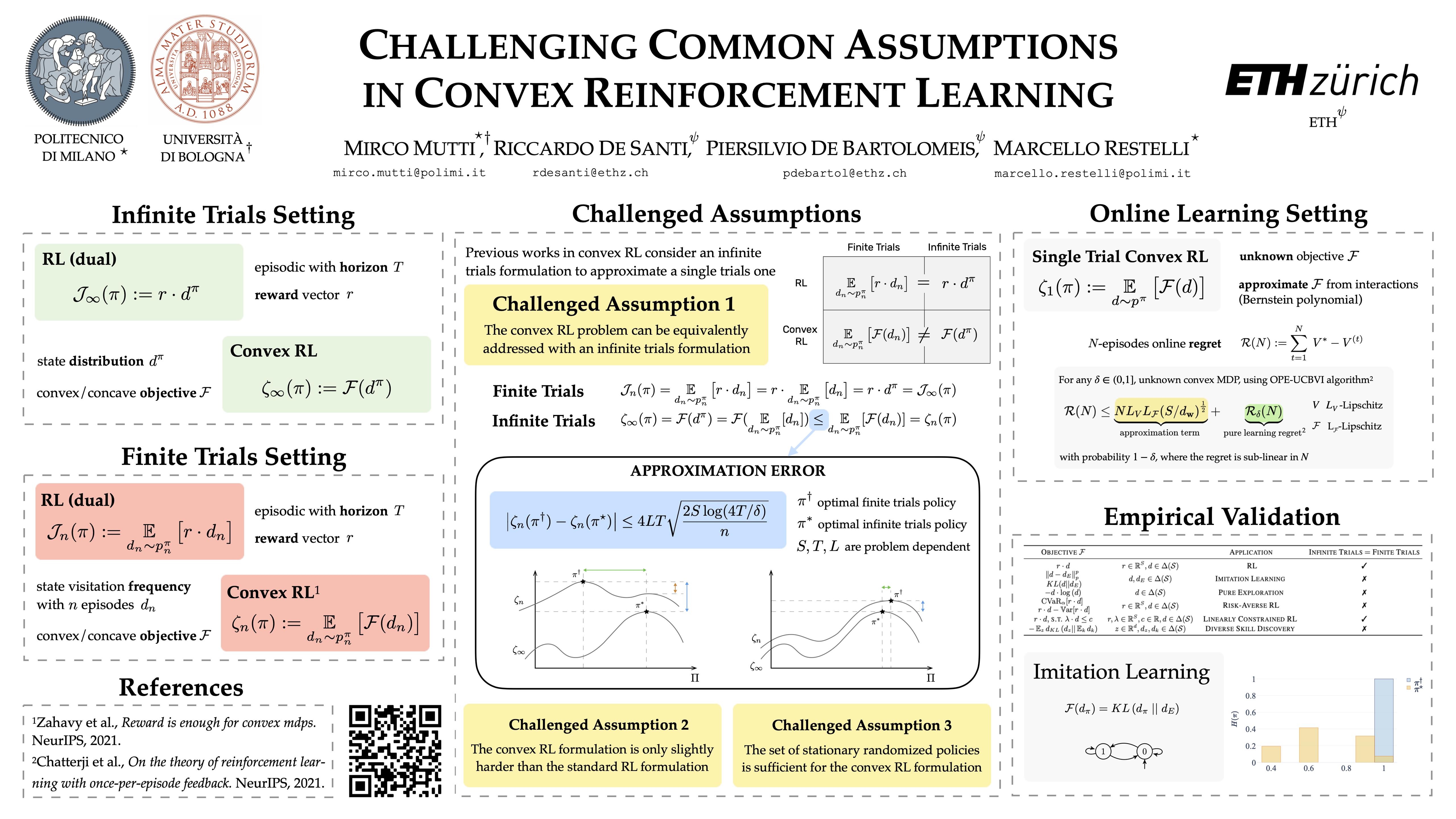
The classic Reinforcement Learning (RL) formulation is concerned with maximizing a scalar reward function. More recently, convex RL has been introduced to extend the RL formulation to all the objectives that are convex function of the state distribution induced by a policy. Notably, convex RL covers several relevant applications that do not fall into the scalar formulation, including imitation learning, risk-averse RL, and pure exploration. In classic RL, it is common to optimize an infinite trials objective, which accounts for the state distribution instead of the empirical state visitation frequencies, even though the actual number of trajectories is always finite in practice. This is theoretically sound since the infinite trials and finite trials objectives can be proved to coincide, and thus lead to the same optimal policy. In this paper, we show that this hidden assumption does not hold in the convex RL setting. In particular, we show that erroneously optimizing the infinite trials objective in place of the actual finite trials one, as it is usually done, can lead to a significant approximation error. Since the finite trials setting is the default in both simulated and real-world RL, we believe that shedding light on this issue will lead to better approaches and methodologies for convex RL, impacting relevant research areas such as imitation learning, risk-averse RL, and pure exploration among others.