ESC: Exploration with Soft Commonsense Constraints for Zero-shot Object Navigation
{kind=link}
Abstract
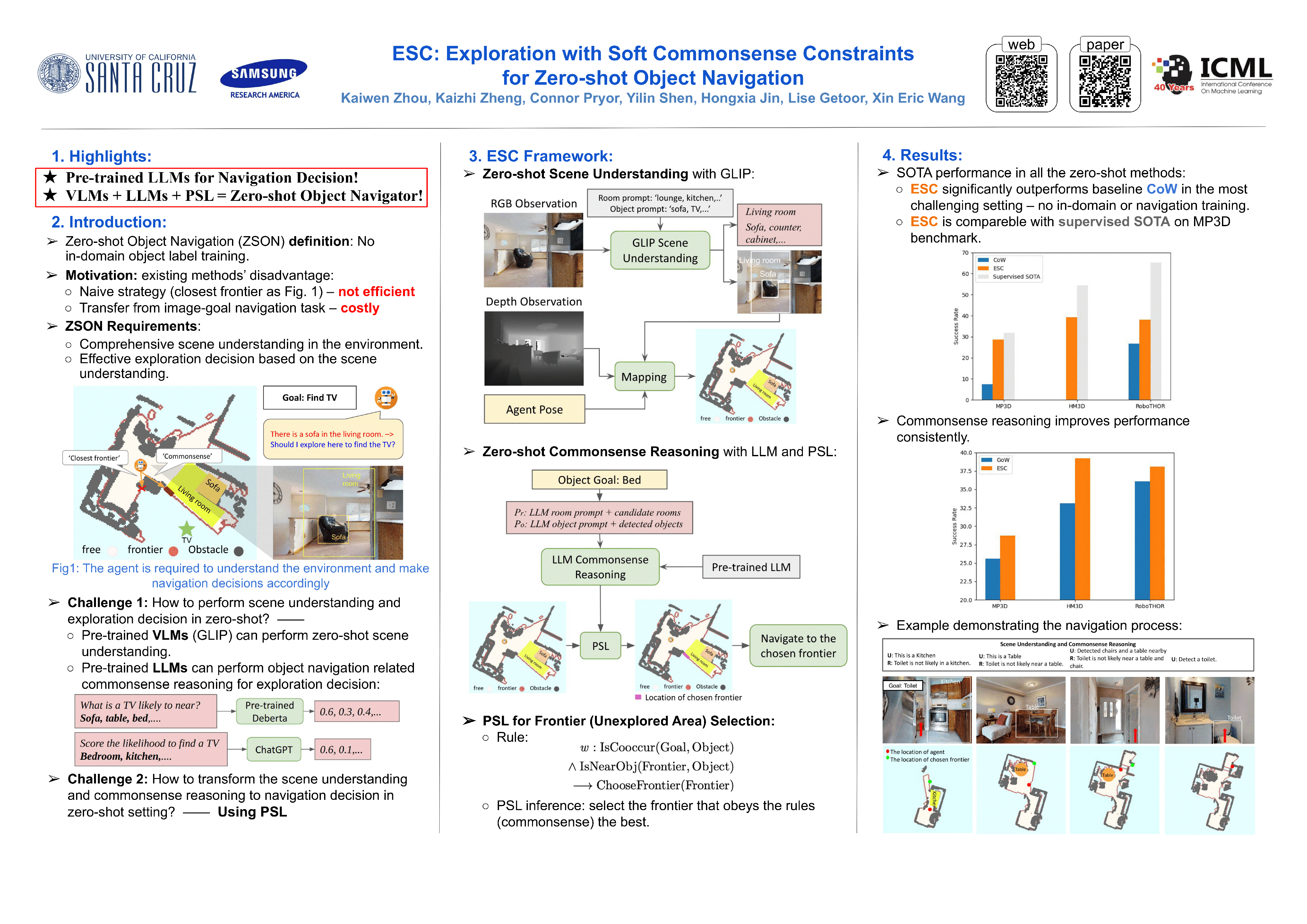
The ability to accurately locate and navigate to a specific object is a crucial capability for embodied agents that operate in the real world and interact with objects to complete tasks. Such object navigation tasks usually require large-scale training in visual environments with labeled objects, which generalizes poorly to novel objects in unknown environments. In this work, we present a novel zero-shot object navigation method, Exploration with Soft Commonsense constraints (ESC), that transfers commonsense knowledge in pre-trained models to open-world object navigation without any navigation experience nor any other training on the visual environments. First, ESC leverages a pre-trained vision and language model for open-world prompt-based grounding and a pre-trained commonsense language model for room and object reasoning. Then ESC converts commonsense knowledge into navigation actions by modeling it as soft logic predicates for efficient exploration. Extensive experiments on MP3D, HM3D, and RoboTHOR benchmarks show that our ESC method improves significantly over baselines, and achieves new state-of-the-art results for zero-shot object navigation (e.g., 288% relative Success Rate improvement than CoW on MP3D).