LipsNet: A Smooth and Robust Neural Network with Adaptive Lipschitz Constant for High Accuracy Optimal Control
{kind=link}
Abstract
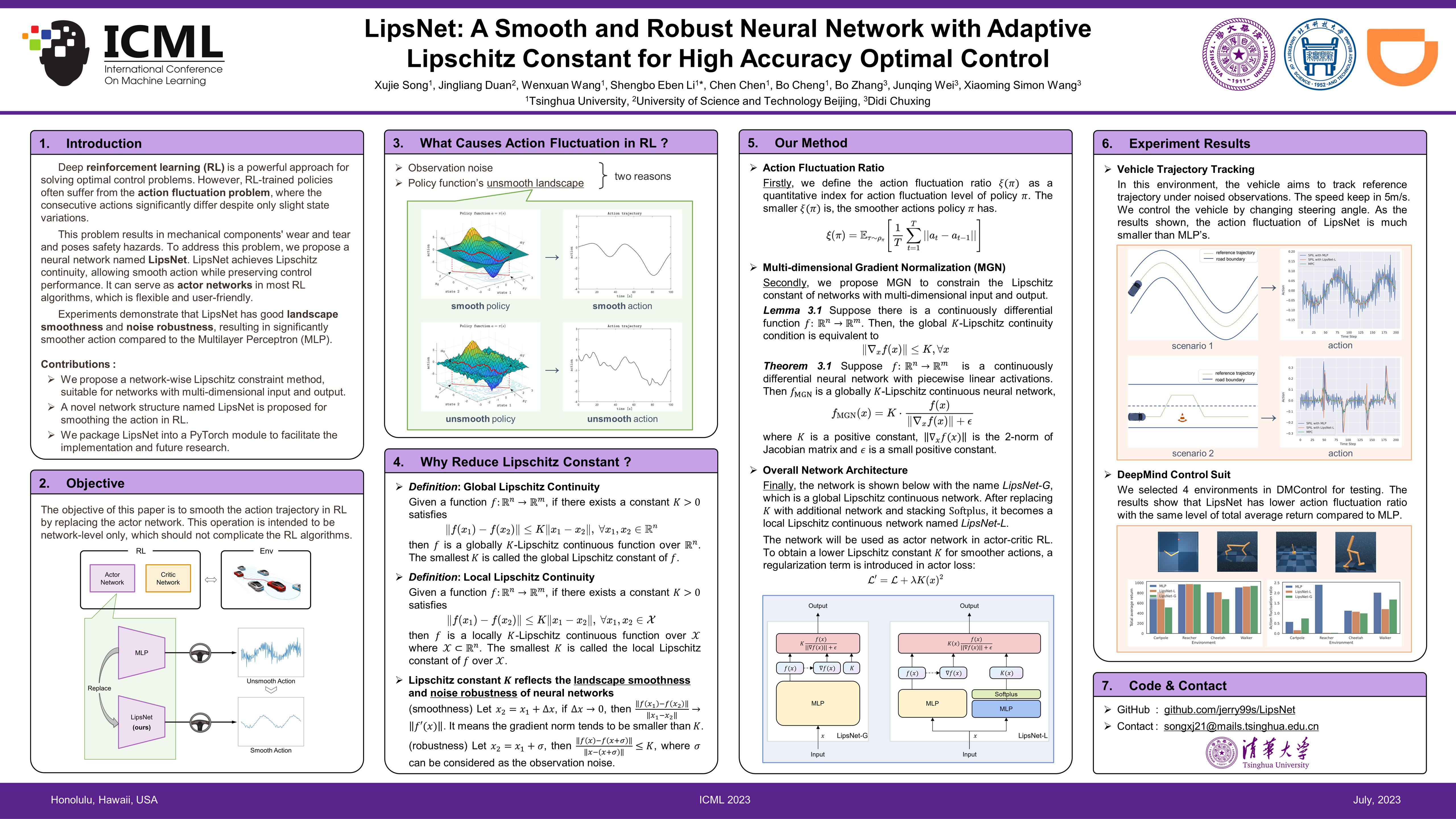
Deep reinforcement learning (RL) is a powerful approach for solving optimal control problems. However, RL-trained policies often suffer from the action fluctuation problem, where the consecutive actions significantly differ despite only slight state variations. This problem results in mechanical components' wear and tear and poses safety hazards. The action fluctuation is caused by the high Lipschitz constant of actor networks. To address this problem, we propose a neural network named LipsNet. We propose the Multi-dimensional Gradient Normalization (MGN) method, to constrain the Lipschitz constant of networks with multi-dimensional input and output. Benefiting from MGN, LipsNet achieves Lipschitz continuity, allowing smooth actions while preserving control performance by adjusting Lipschitz constant. LipsNet addresses the action fluctuation problem at network level rather than algorithm level, which can serve as actor networks in most RL algorithms, making it more flexible and user-friendly than previous works. Experiments demonstrate that LipsNet has good landscape smoothness and noise robustness, resulting in significantly smoother action compared to the Multilayer Perceptron.