A Critical Revisit of Adversarial Robustness in 3D Point Cloud Recognition with Diffusion-Driven Purification
Jiachen Sun ⋅ Jiongxiao Wang ⋅ Weili Nie ⋅ Zhiding Yu ⋅ Zhuoqing Morley Mao ⋅ Chaowei Xiao
2023 Poster
{kind=link}
Abstract
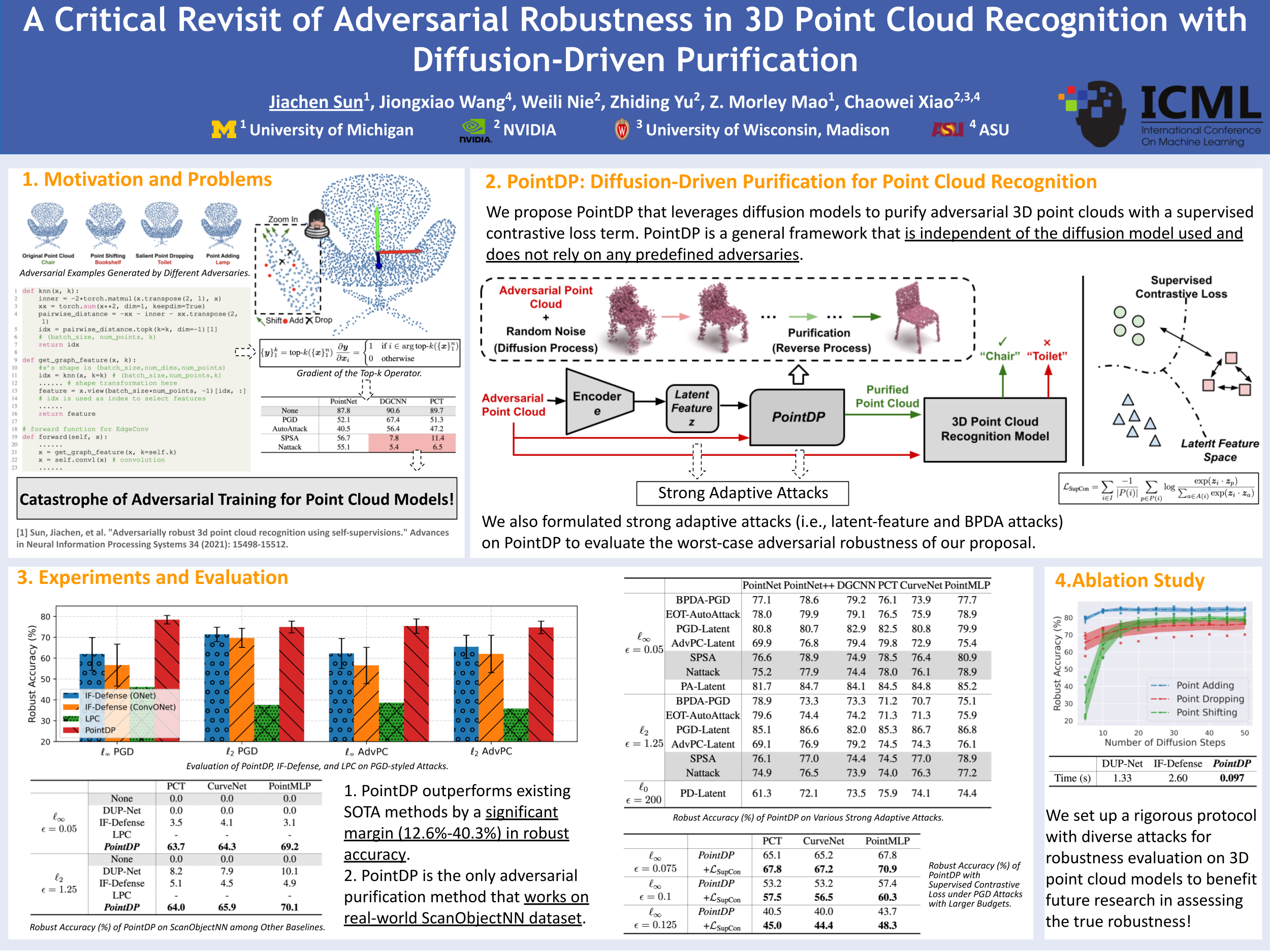
3D point clouds serve as a crucial data representation in numerous real-world applications such as autonomous driving, robotics, and medical imaging. While the advancements in deep learning have spurred the utilization of 3D point clouds, deep models are notoriously vulnerable to adversarial attacks. Various defense solutions have been proposed to build robust models against adversarial attacks. In this work, we pinpoint a major limitation of the leading empirical defense, adversarial training, when applied to 3D point cloud models: gradient obfuscation, which significantly hampers robustness against potent attacks. To bridge the gap, we propose PointDP, a purification strategy that leverages diffusion models to defend against 3D adversarial attacks. Since PointDP does not rely on predefined adversarial examples for training, it can defend against a variety of threats. We conduct a comprehensive evaluation of PointDP across six representative 3D point cloud architectures, employing sixteen strong and adaptive attacks to manifest its foundational robustness. Our evaluation shows that PointDP achieves significantly better (i.e., 12.6%-40.3%) adversarial robustness than state-of-the-art methods under strong attacks bounded by different $\ell_p$ norms.
Video
Chat is not available.
Successful Page Load