Implicit Graph Neural Networks: A Monotone Operator Viewpoint
{kind=link}
Abstract
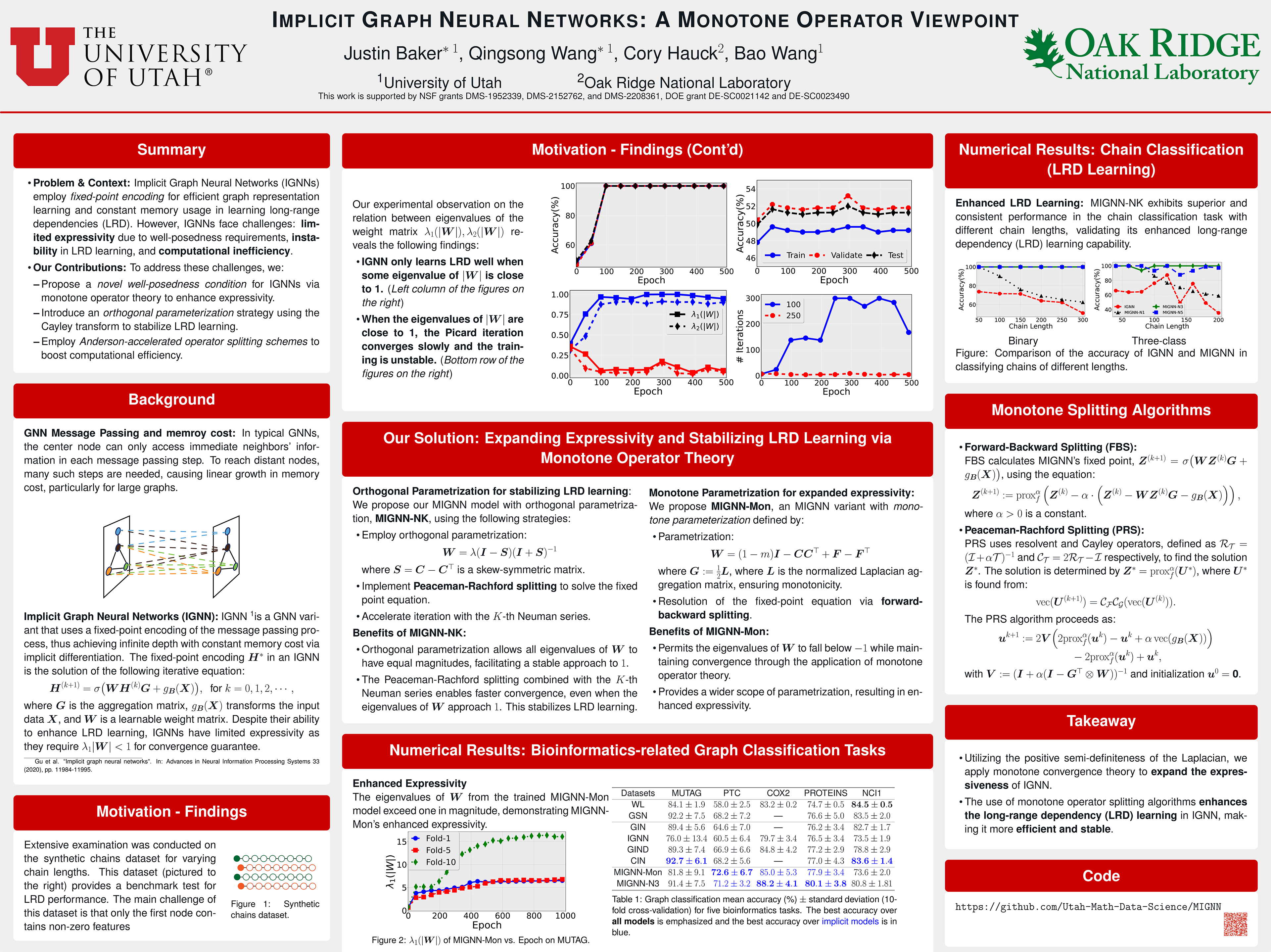
Implicit graph neural networks (IGNNs) -- that solve a fixed-point equilibrium equation using Picard iteration for representation learning -- have shown remarkable performance in learning long-range dependencies (LRD) in the underlying graphs. However, IGNNs suffer from several issues, including 1) their expressivity is limited by their parameterizations for the well-posedness guarantee, 2) IGNNs are unstable in learning LRD, and 3) IGNNs become computationally inefficient when learning LRD. In this paper, we provide a new well-posedness characterization for IGNNs leveraging monotone operator theory, resulting in a much more expressive parameterization than the existing one. We also propose an orthogonal parameterization for IGNN based on Cayley transform to stabilize learning LRD. Furthermore, we leverage Anderson-accelerated operator splitting schemes to efficiently solve for the fixed point of the equilibrium equation of IGNN with monotone or orthogonal parameterization. We verify the computational efficiency and accuracy of the new models over existing IGNNs on various graph learning tasks at both graph and node levels.