Variational Curriculum Reinforcement Learning for Unsupervised Discovery of Skills
{kind=link}
Abstract
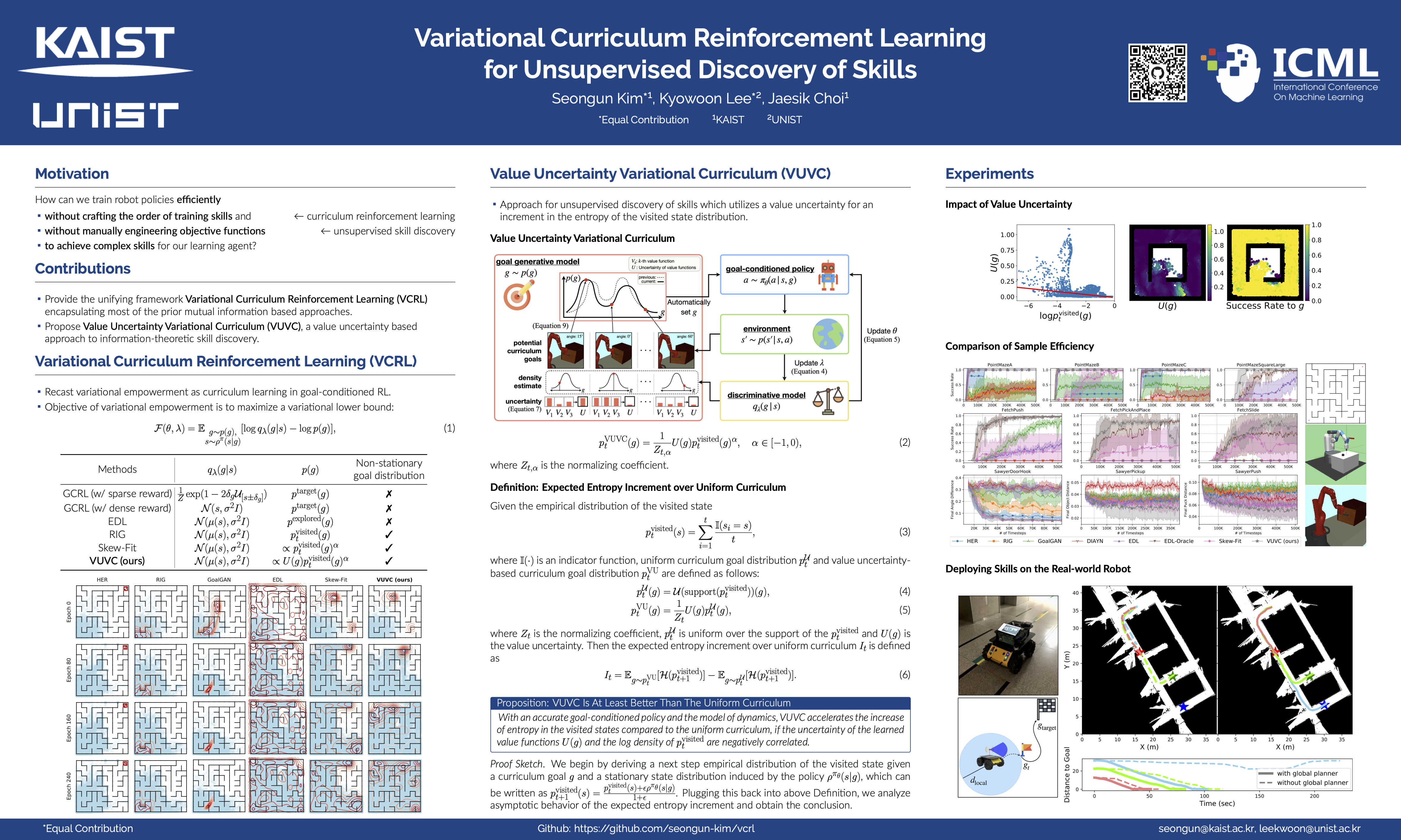
Mutual information-based reinforcement learning (RL) has been proposed as a promising framework for retrieving complex skills autonomously without a task-oriented reward function through mutual information (MI) maximization or variational empowerment. However, learning complex skills is still challenging, due to the fact that the order of training skills can largely affect sample efficiency. Inspired by this, we recast variational empowerment as curriculum learning in goal-conditioned RL with an intrinsic reward function, which we name Variational Curriculum RL (VCRL). From this perspective, we propose a novel approach to unsupervised skill discovery based on information theory, called Value Uncertainty Variational Curriculum (VUVC). We prove that, under regularity conditions, VUVC accelerates the increase of entropy in the visited states compared to the uniform curriculum. We validate the effectiveness of our approach on complex navigation and robotic manipulation tasks in terms of sample efficiency and state coverage speed. We also demonstrate that the skills discovered by our method successfully complete a real-world robot navigation task in a zero-shot setup and that incorporating these skills with a global planner further increases the performance.