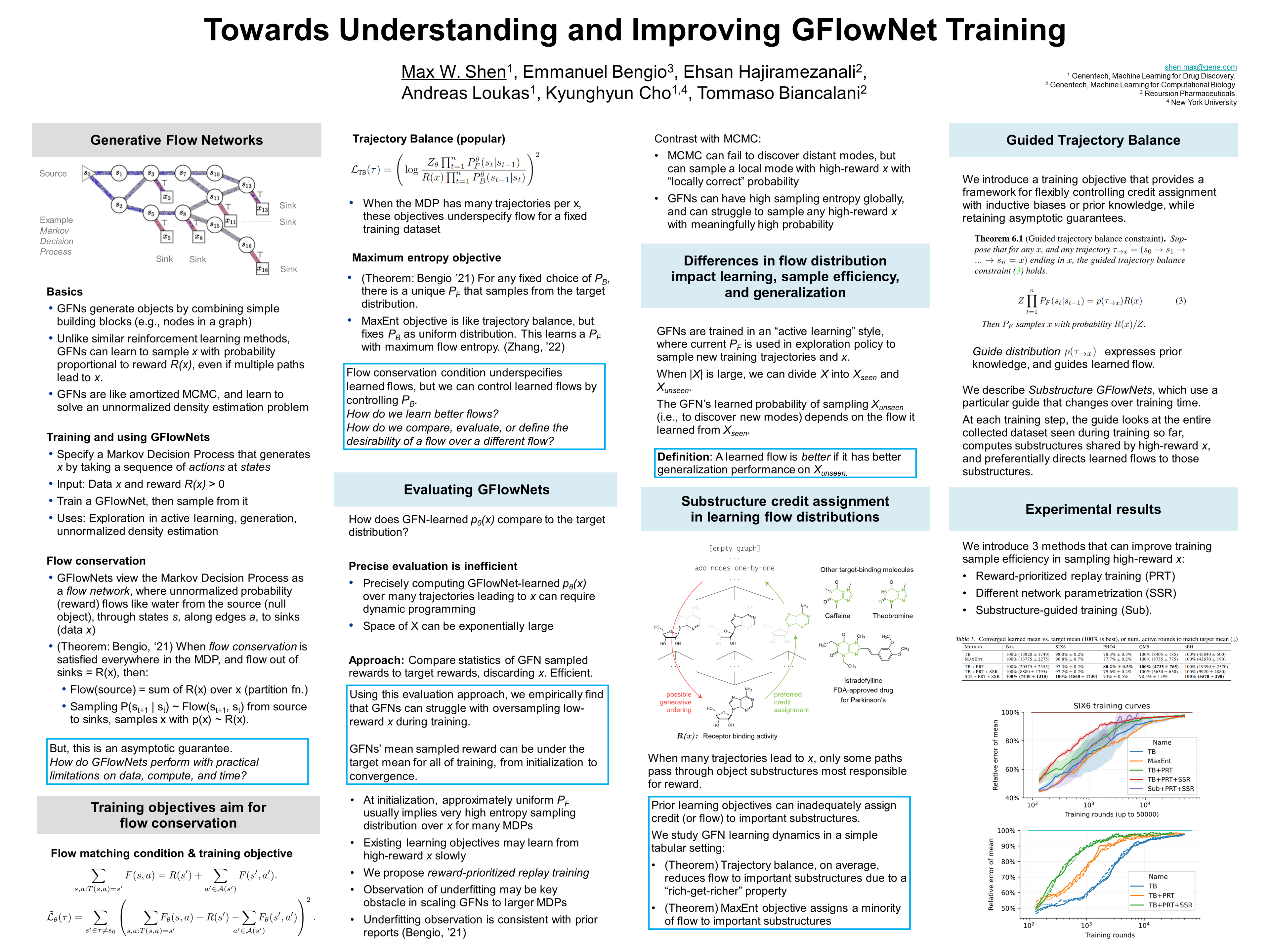
Towards Understanding and Improving GFlowNet Training
Max Shen ⋅ Emmanuel Bengio ⋅ Ehsan Hajiramezanali ⋅ Andreas Loukas ⋅ Kyunghyun Cho ⋅ Tommaso Biancalani
2023 Poster
{kind=link}
Abstract
Generative flow networks (GFlowNets) are a family of algorithms that learn a generative policy to sample discrete objects $x$ with non-negative reward $R(x)$. Learning objectives guarantee the GFlowNet samples $x$ from the target distribution $p^*(x) \propto R(x)$ when loss is globally minimized over all states or trajectories, but it is unclear how well they perform with practical limits on training resources. We introduce an efficient evaluation strategy to compare the learned sampling distribution to the target reward distribution. As flows can be underdetermined given training data, we clarify the importance of learned flows to generalization and matching $p^*(x)$ in practice. We investigate how to learn better flows, and propose (i) prioritized replay training of high-reward $x$, (ii) relative edge flow policy parametrization, and (iii) a novel guided trajectory balance objective, and show how it can solve a substructure credit assignment problem. We substantially improve sample efficiency on biochemical design tasks.
Video
Chat is not available.
Successful Page Load