Inverse Reinforcement Learning without Reinforcement Learning
{kind=link}
Abstract
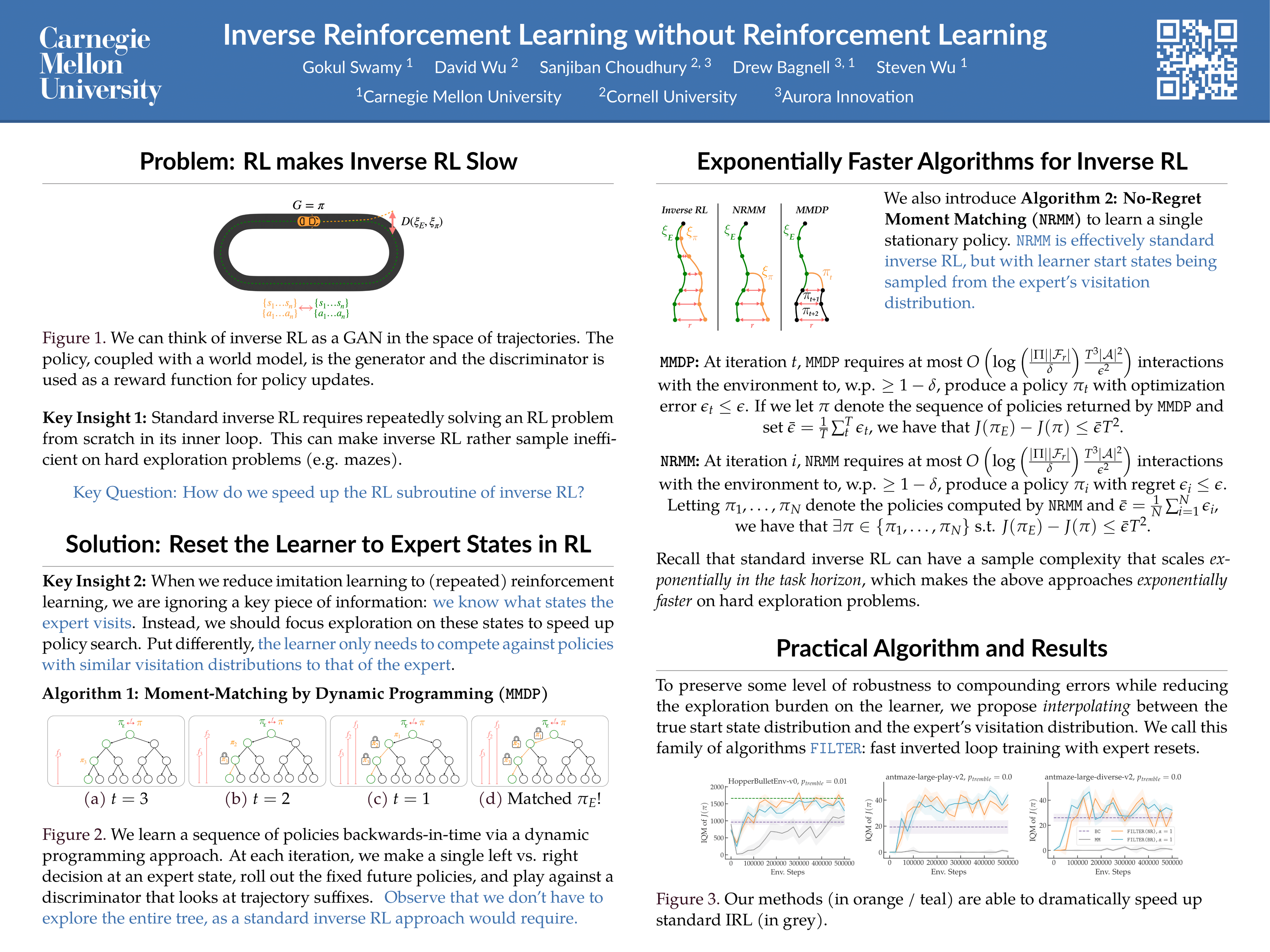
Inverse Reinforcement Learning (IRL) is a powerful set of techniques for imitation learning that aims to learn a reward function that rationalizes expert demonstrations. Unfortunately, traditional IRL methods suffer from a computational weakness: they require repeatedly solving a hard reinforcement learning (RL) problem as a subroutine. This is counter-intuitive from the viewpoint of reductions: we have reduced the easier problem of imitation learning to repeatedly solving the harder problem of RL. Another thread of work has proved that access to the side-information of the distribution of states where a strong policy spends time can dramatically reduce the sample and computational complexities of solving an RL problem. In this work, we demonstrate for the first time a more informed imitation learning reduction where we utilize the state distribution of the expert to alleviate the global exploration component of the RL subroutine, providing an exponential speedup in theory. In practice, we find that we are able to significantly speed up the prior art on continuous control tasks.