Efficient Online Reinforcement Learning with Offline Data
Philip Ball ⋅ Laura Smith ⋅ Ilya Kostrikov ⋅ Sergey Levine
2023 Poster
{kind=link}
Abstract
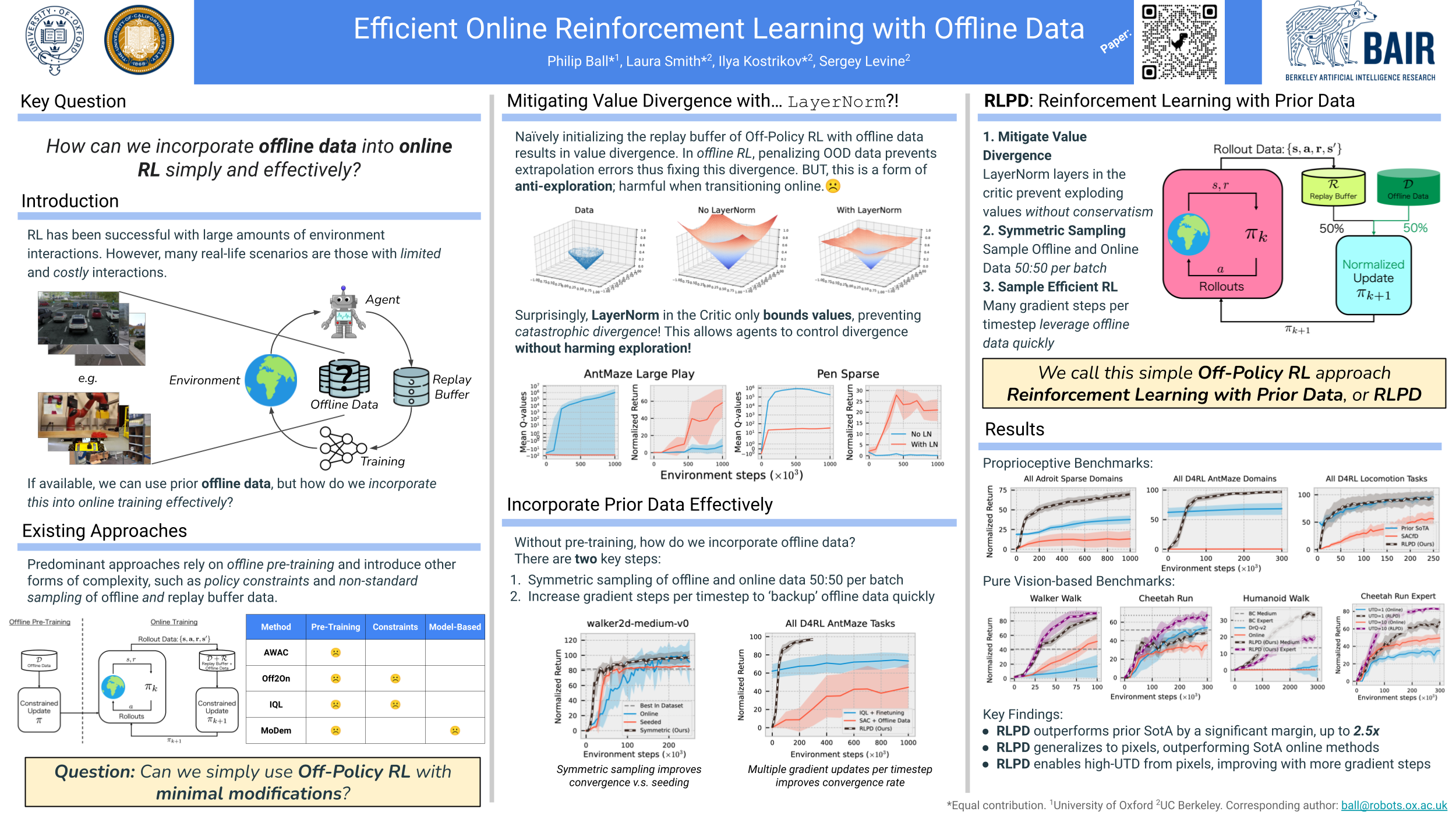
Sample efficiency and exploration remain major challenges in online reinforcement learning (RL). A powerful approach that can be applied to address these issues is the inclusion of offline data, such as prior trajectories from a human expert or a sub-optimal exploration policy. Previous methods have relied on extensive modifications and additional complexity to ensure the effective use of this data. Instead, we ask: *can we simply apply existing off-policy methods to leverage offline data when learning online?* In this work, we demonstrate that the answer is yes; however, a set of minimal but important changes to existing off-policy RL algorithms are required to achieve reliable performance. We extensively ablate these design choices, demonstrating the key factors that most affect performance, and arrive at a set of recommendations that practitioners can readily apply, whether their data comprise a small number of expert demonstrations or large volumes of sub-optimal trajectories. We see that correct application of these simple recommendations can provide a $\mathbf{2.5\times}$ improvement over existing approaches across a diverse set of competitive benchmarks, with no additional computational overhead.
Video
Chat is not available.
Successful Page Load