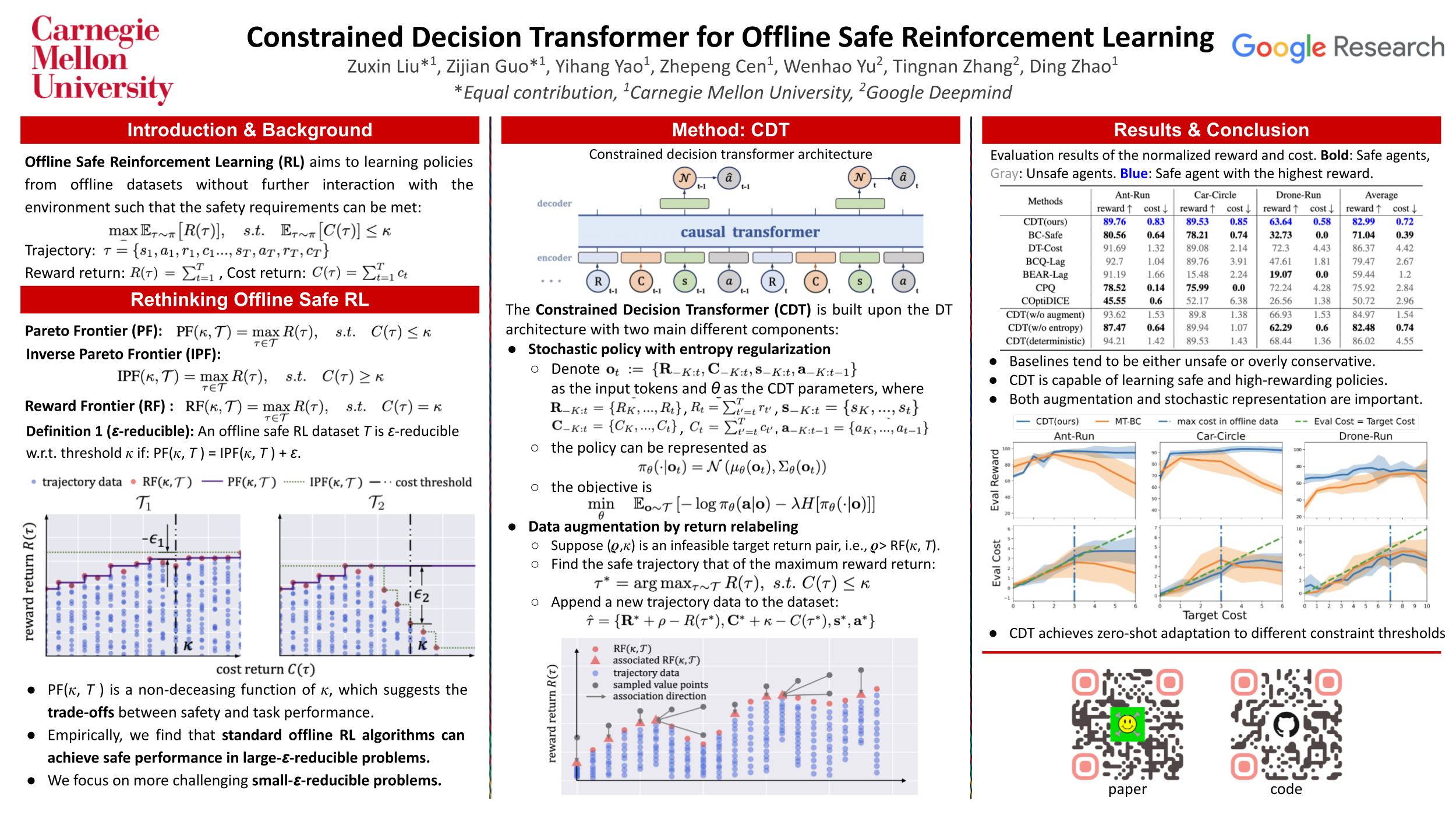
Constrained Decision Transformer for Offline Safe Reinforcement Learning
Zuxin Liu ⋅ Zijian Guo ⋅ Yihang Yao ⋅ Zhepeng Cen ⋅ Wenhao Yu ⋅ Tingnan Zhang ⋅ Ding Zhao
2023 Poster
{kind=link}
Abstract
Safe reinforcement learning (RL) trains a constraint satisfaction policy by interacting with the environment. We aim to tackle a more challenging problem: learning a safe policy from an offline dataset. We study the offline safe RL problem from a novel multi-objective optimization perspective and propose the $\epsilon$-reducible concept to characterize problem difficulties. The inherent trade-offs between safety and task performance inspire us to propose the constrained decision transformer (CDT) approach, which can dynamically adjust the trade-offs during deployment. Extensive experiments show the advantages of the proposed method in learning an adaptive, safe, robust, and high-reward policy. CDT outperforms its variants and strong offline safe RL baselines by a large margin with the same hyperparameters across all tasks, while keeping the zero-shot adaptation capability to different constraint thresholds, making our approach more suitable for real-world RL under constraints.
Video
Chat is not available.
Successful Page Load