Demonstration-free Autonomous Reinforcement Learning via Implicit and Bidirectional Curriculum
{kind=link}
Abstract
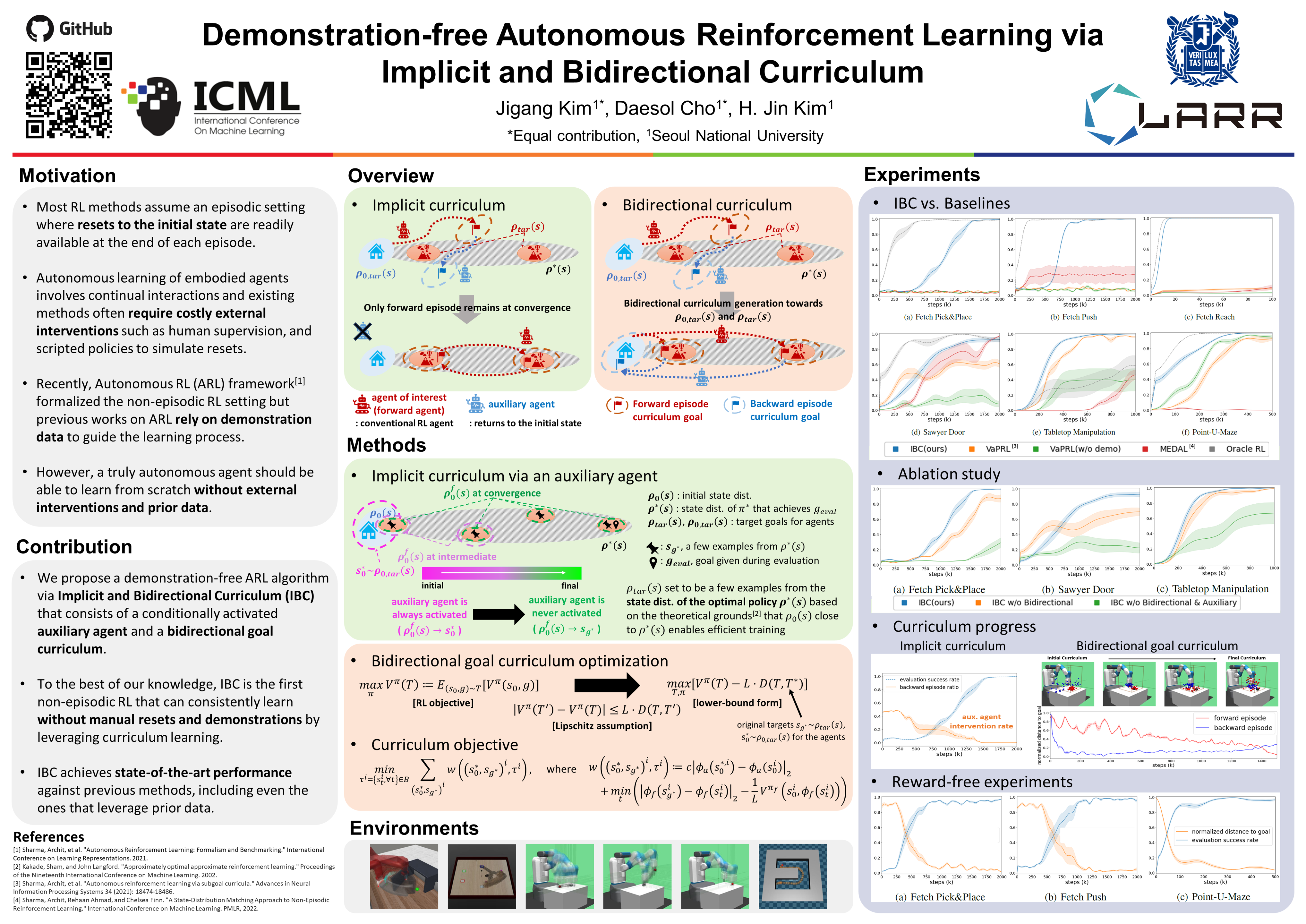
While reinforcement learning (RL) has achieved great success in acquiring complex skills solely from environmental interactions, it assumes that resets to the initial state are readily available at the end of each episode. Such an assumption hinders the autonomous learning of embodied agents due to the time-consuming and cumbersome workarounds for resetting in the physical world. Hence, there has been a growing interest in autonomous RL (ARL) methods that are capable of learning from non-episodic interactions. However, existing works on ARL are limited by their reliance on prior data and are unable to learn in environments where task-relevant interactions are sparse. In contrast, we propose a demonstration-free ARL algorithm via Implicit and Bi-directional Curriculum (IBC). With an auxiliary agent that is conditionally activated upon learning progress and a bidirectional goal curriculum based on optimal transport, our method outperforms previous methods, even the ones that leverage demonstrations.