Stabilizing GANs' Training with Brownian Motion Controller
{kind=link}
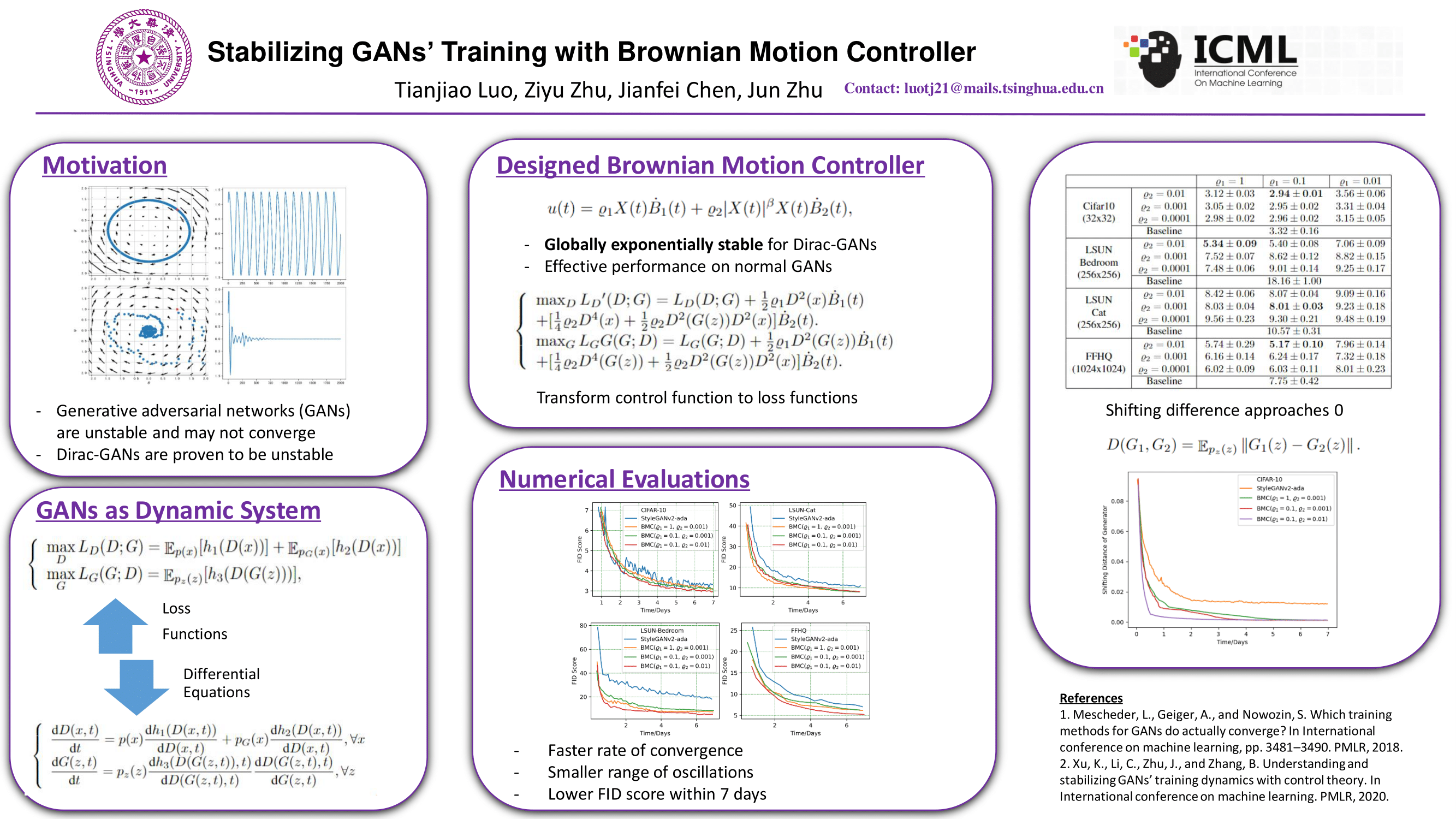
Abstract
The training process of generative adversarial networks (GANs) is unstable and does not converge globally. In this paper, we examine the stability of GANs from the perspective of control theory and propose a universal higher-order noise-based controller called Brownian Motion Controller (BMC). Starting with the prototypical case of Dirac-GANs, we design a BMC to retrieve precisely the same but reachable optimal equilibrium. We theoretically prove that the training process of DiracGANs-BMC is globally exponential stable and derive bounds on the rate of convergence. Then we extend our BMC to normal GANs and provide implementation instructions on GANs-BMC. Our experiments show that our GANs-BMC effectively stabilizes GANs' training under StyleGANv2-ada frameworks with a faster rate of convergence, a smaller range of oscillation, and better performance in terms of FID score.