Benchmarking and Analyzing Point Cloud Classification under Corruptions
{kind=link}
Abstract
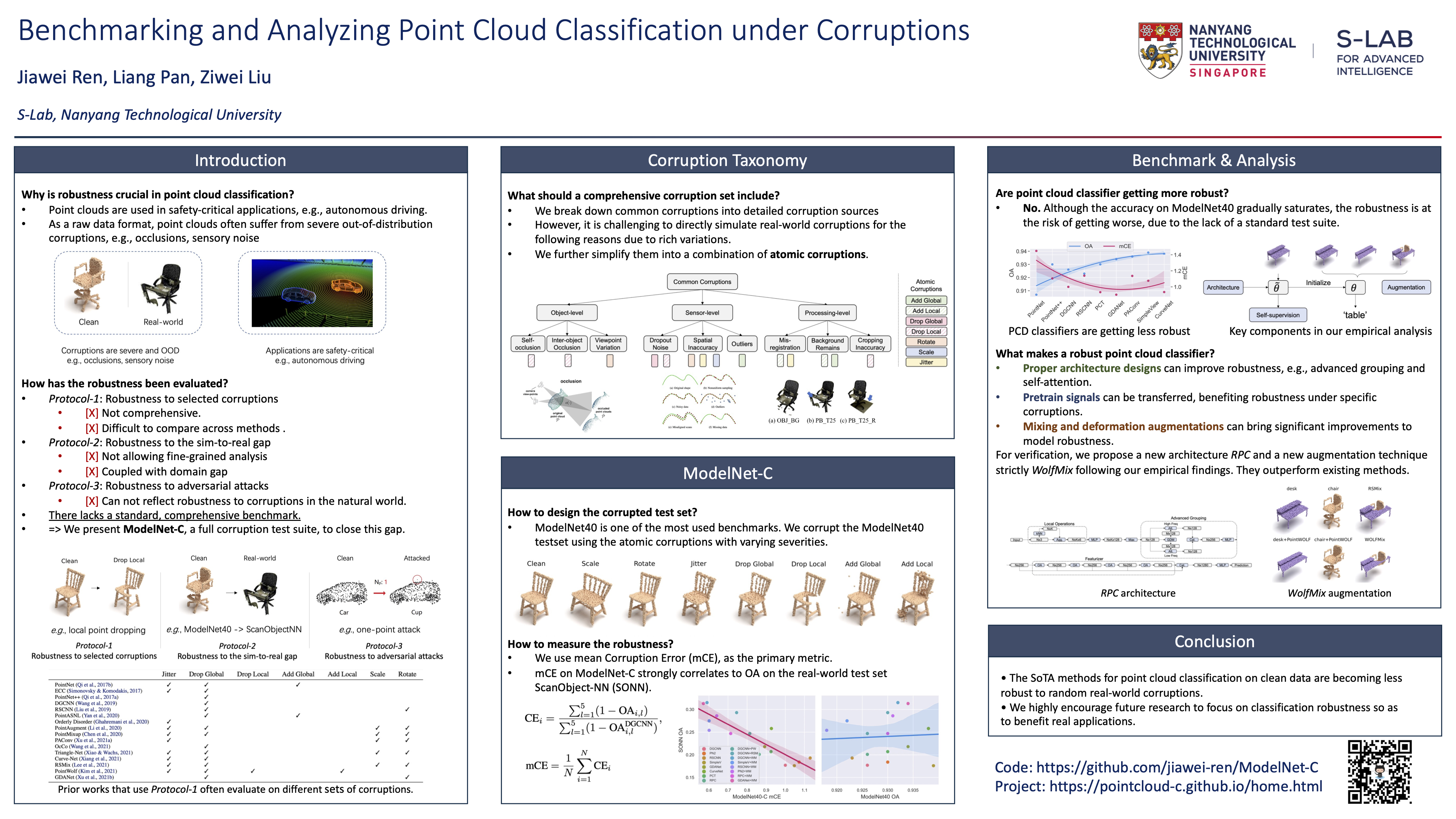
3D perception, especially point cloud classification, has achieved substantial progress. However, in real-world deployment, point cloud corruptions are inevitable due to the scene complexity, sensor inaccuracy, and processing imprecision. In this work, we aim to rigorously benchmark and analyze point cloud classification under corruptions. To conduct a systematic investigation, we first provide a taxonomy of common 3D corruptions and identify the atomic corruptions. Then, we perform a comprehensive evaluation on a wide range of representative point cloud models to understand their robustness and generalizability. Our benchmark results show that although point cloud classification performance improves over time, the state-of-the-art methods are on the verge of being less robust. Based on the obtained observations, we propose several effective techniques to enhance point cloud classifier robustness. We hope our comprehensive benchmark, in-depth analysis, and proposed techniques could spark future research in robust 3D perception.