Provably Adversarially Robust Nearest Prototype Classifiers
Václav Voráček ⋅ Matthias Hein
2022 Poster
{kind=link}
Abstract
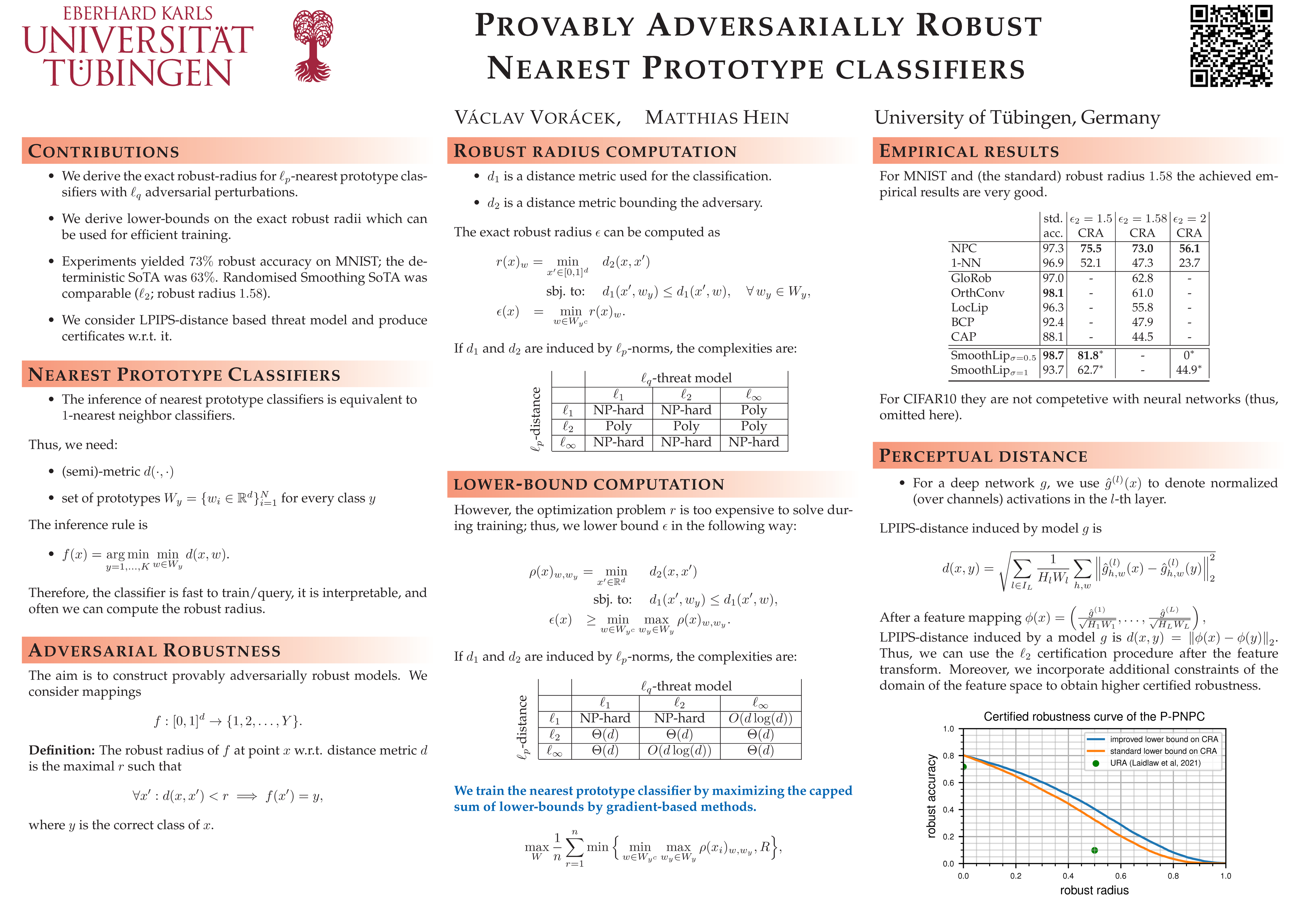
Nearest prototype classifiers (NPCs) assign to each input point the label of the nearest prototype with respect to a chosen distance metric. A direct advantage of NPCs is that the decisions are interpretable. Previous work could provide lower bounds on the minimal adversarial perturbation in the $\ell_p$-threat model when using the same $\ell_p$-distance for the NPCs. In this paper we provide a complete discussion on the complexity when using $\ell_p$-distances for decision and $\ell_q$-threat models for certification for $p,q \in \{1,2,\infty\}$. In particular we provide scalable algorithms for the \emph{exact} computation of the minimal adversarial perturbation when using $\ell_2$-distance and improved lower bounds in other cases. Using efficient improved lower bounds we train our \textbf{P}rovably adversarially robust \textbf{NPC} (PNPC), for MNIST which have better $\ell_2$-robustness guarantees than neural networks. Additionally, we show up to our knowledge the first certification results w.r.t. to the LPIPS perceptual metric which has been argued to be a more realistic threat model for image classification than $\ell_p$-balls. Our PNPC has on CIFAR10 higher certified robust accuracy than the empirical robust accuracy reported in \cite{laidlaw2021perceptual}. The code is available in our~\href{https://github.com/vvoracek/Provably-Adversarially-Robust-Nearest-Prototype-Classifiers}{repository}.
Chat is not available.
Successful Page Load