Translating Robot Skills: Learning Unsupervised Skill Correspondences Across Robots
{kind=link}
Abstract
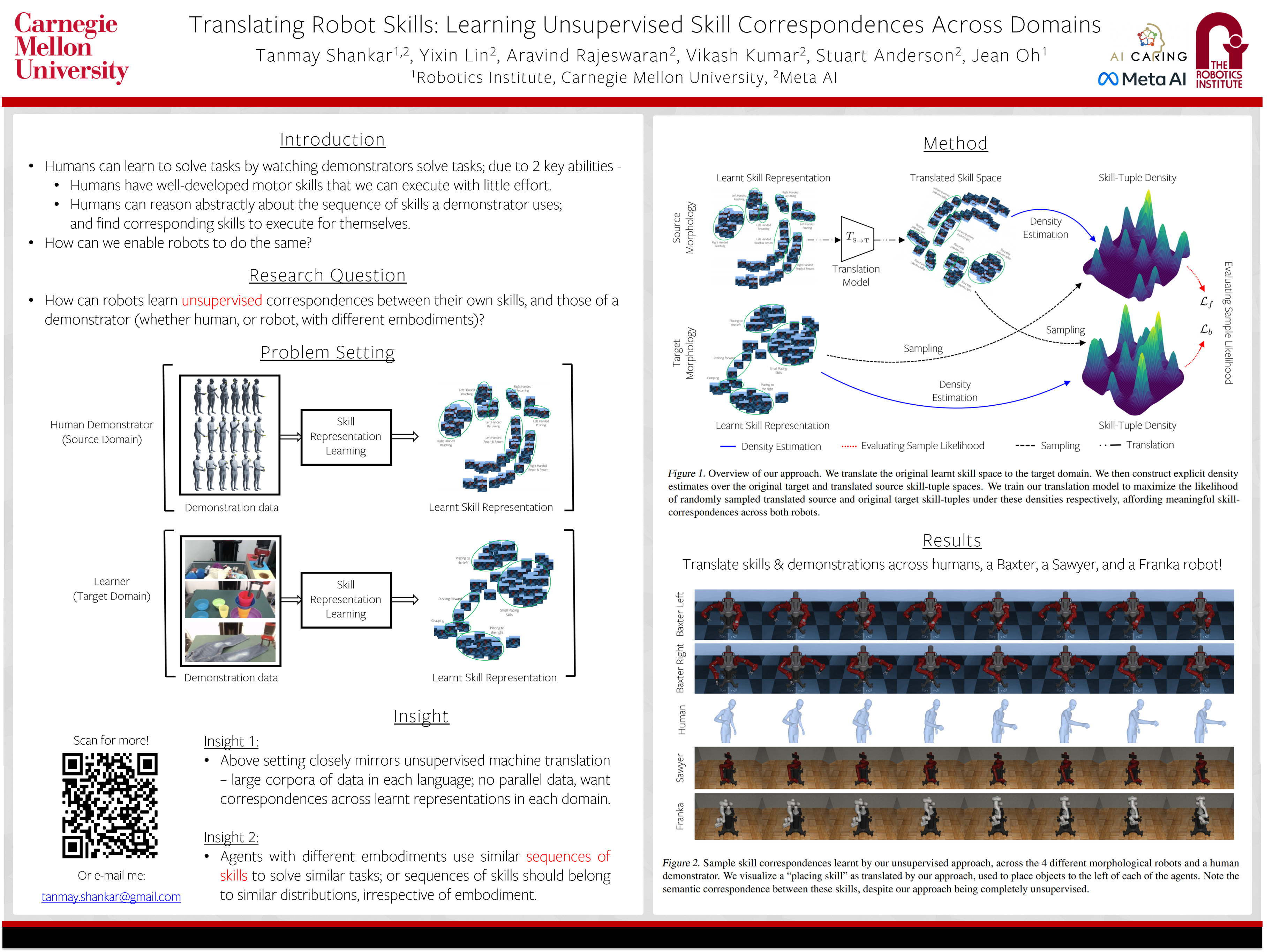
In this paper, we explore how we can endow robots with the ability to learn correspondences between their own skills, and those of morphologically different robots in different domains, in an entirely unsupervised manner. We make the insight that different morphological robots use similar task strategies to solve similar tasks. Based on this insight, we frame learning skill correspondences as a problem of matching distributions of sequences of skills across robots. We then present an unsupervised objective that encourages a learnt skill translation model to match these distributions across domains, inspired by recent advances in unsupervised machine translation. Our approach is able to learn semantically meaningful correspondences between skills across multiple robot-robot and human-robot domain pairs despite being completely unsupervised. Further, the learnt correspondences enable the transfer of task strategies across robots and domains. We present dynamic visualizations of our results at https://sites.google.com/view/translatingrobotskills/home.