Pessimistic Q-Learning for Offline Reinforcement Learning: Towards Optimal Sample Complexity
{kind=link}
Abstract
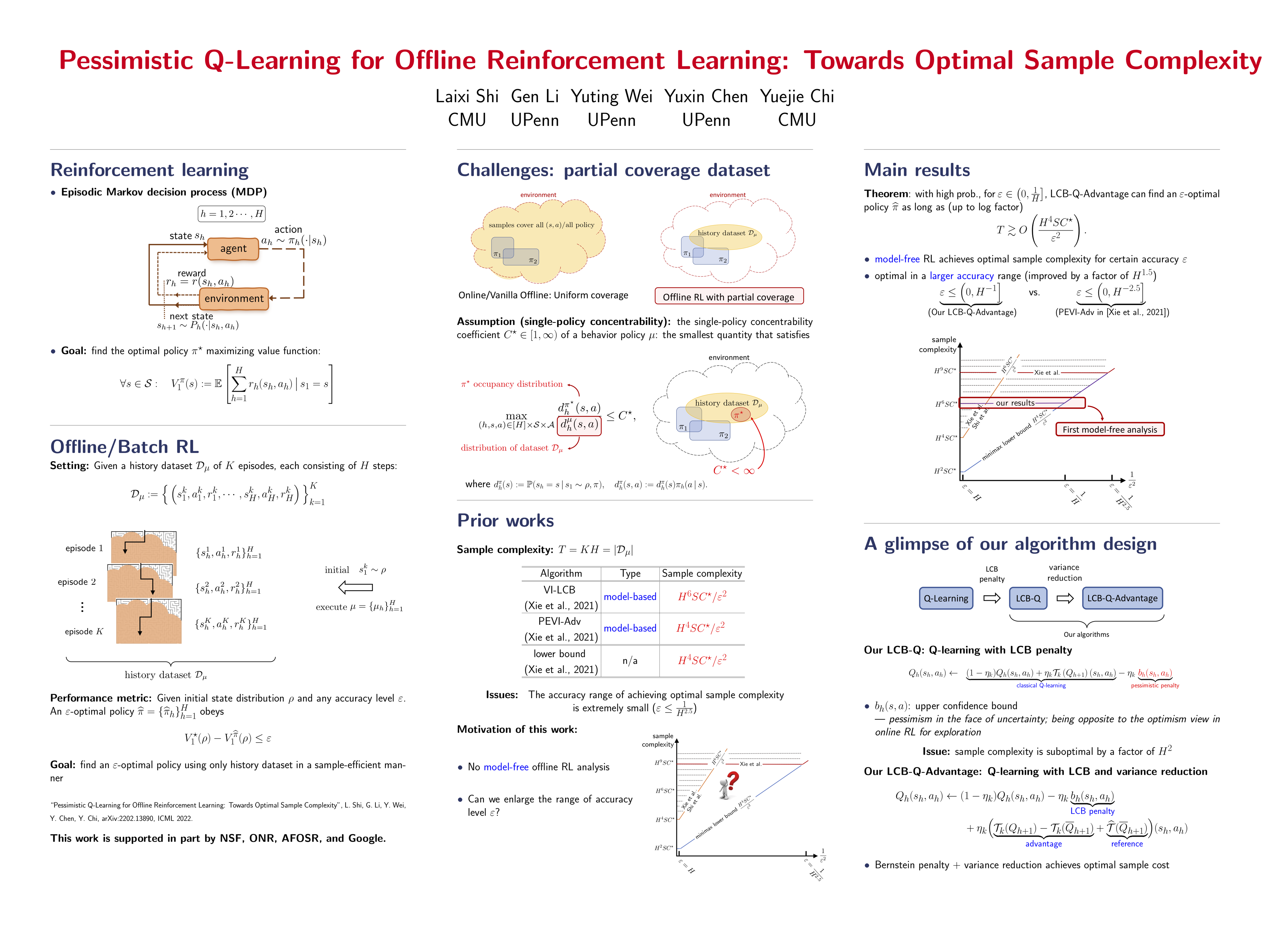
Offline or batch reinforcement learning seeks to learn a near-optimal policy using history data without active exploration of the environment. To counter the insufficient coverage and sample scarcity of many offline datasets, the principle of pessimism has been recently introduced to mitigate high bias of the estimated values. While pessimistic variants of model-based algorithms (e.g., value iteration with lower confidence bounds) have been theoretically investigated, their model-free counterparts --- which do not require explicit model estimation --- have not been adequately studied, especially in terms of sample efficiency. To address this inadequacy, we study a pessimistic variant of Q-learning in the context of finite-horizon Markov decision processes, and characterize its sample complexity under the single-policy concentrability assumption which does not require the full coverage of the state-action space. In addition, a variance-reduced pessimistic Q-learning algorithm is proposed to achieve near-optimal sample complexity. Altogether, this work highlights the efficiency of model-free algorithms in offline RL when used in conjunction with pessimism and variance reduction.