{kind=link}
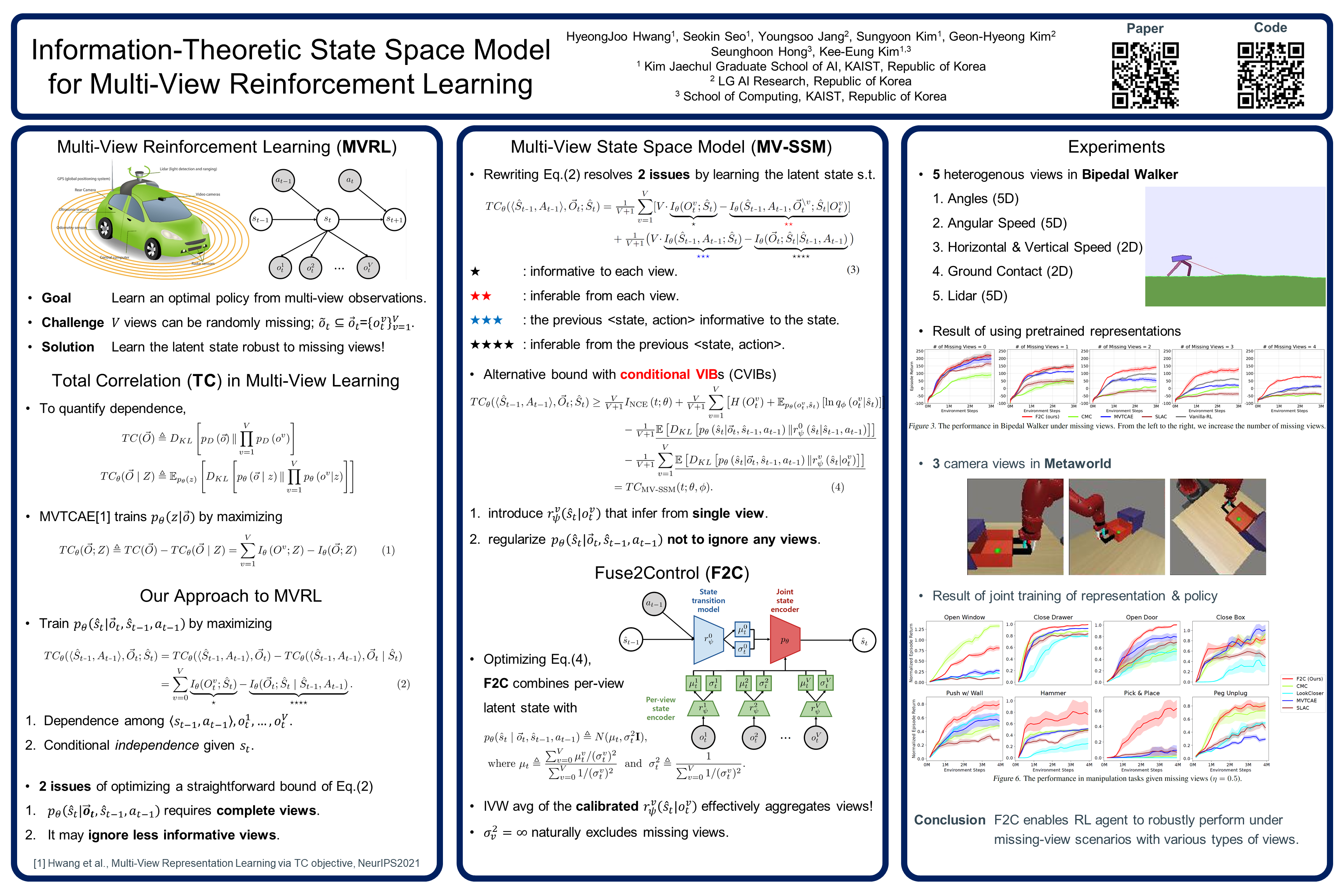
Multi-View Reinforcement Learning (MVRL) seeks to find an optimal control for an agent given multi-view observations from various sources. Despite recent advances in multi-view learning that aim to extract the latent representation from multi-view data, it is not straightforward to apply them to control tasks, especially when the observations are temporally dependent on one another. The problem can be even more challenging if the observations are intermittently missing for a subset of views. In this paper, we introduce Fuse2Control (F2C), an information-theoretic approach to capturing the underlying state space model from the sequences of multi-view observations. We conduct an extensive set of experiments in various control tasks showing that our method is highly effective in aggregating task-relevant information across many views, that scales linearly with the number of views while retaining robustness to arbitrary missing view scenarios.