{kind=link}
Abstract:
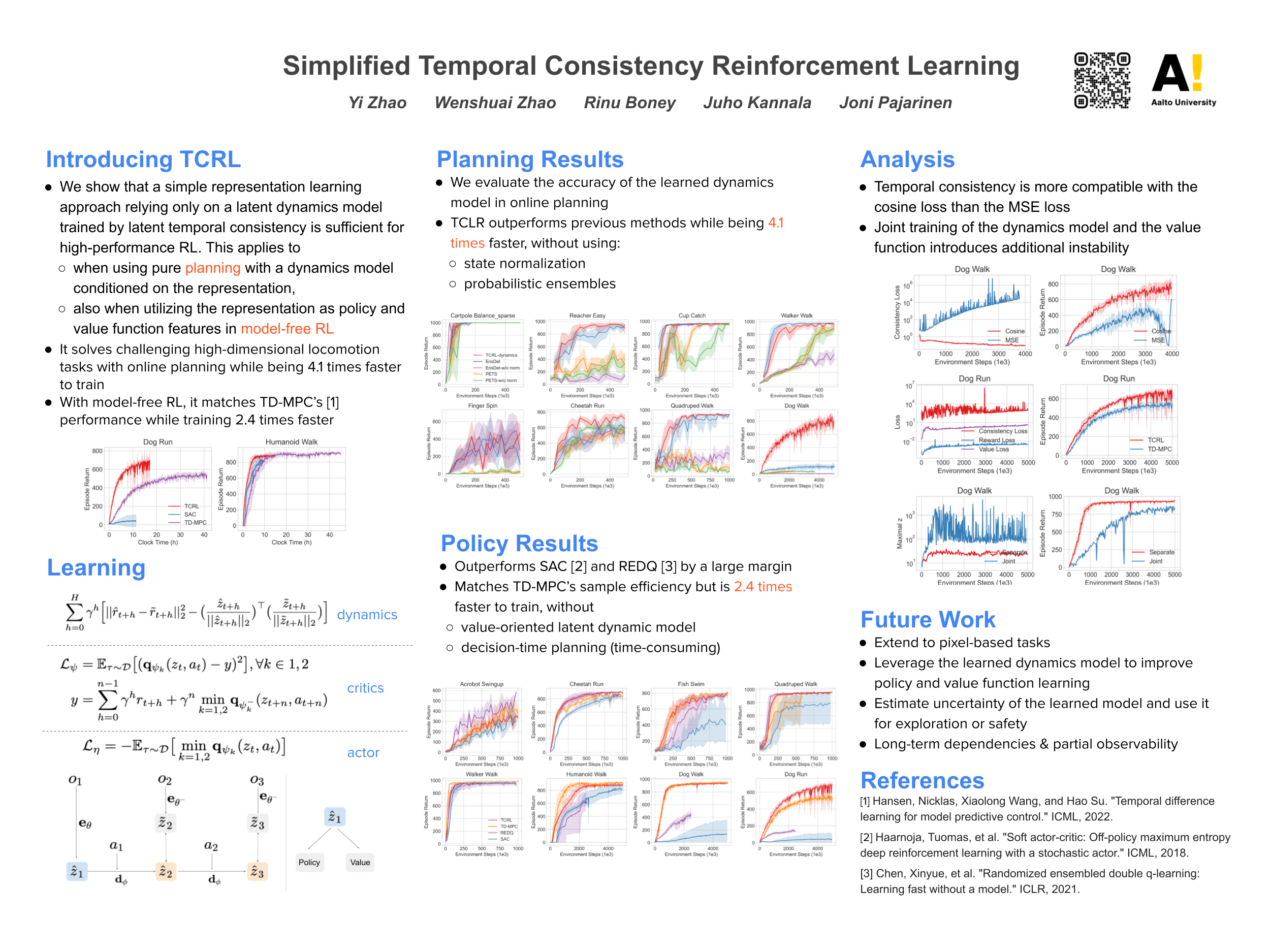
Reinforcement learning (RL) is able to solve complex sequential decision-making tasks but is currently limited by sample efficiency and required computation. To improve sample efficiency, recent work focuses on model-based RL which interleaves model learning with planning. Recent methods further utilize policy learning, value estimation, and, self-supervised learning as auxiliary objectives. In this paper we show that, surprisingly, a simple representation learning approach relying only on a latent dynamics model trained by latent temporal consistency is sufficient for high-performance RL. This applies when using pure planning with a dynamics model conditioned on the representation, but, also when utilizing the representation as policy and value function features in model-free RL. In experiments, our approach learns an accurate dynamics model to solve challenging high-dimensional locomotion tasks with online planners while being 4.1$\times$ faster to train compared to ensemble-based methods. With model-free RL without planning, especially on high-dimensional tasks, such as the Deepmind Control Suite Humanoid and Dog tasks, our approach outperforms model-free methods by a large margin and matches model-based methods' sample efficiency while training 2.4$\times$ faster.
Chat is not available.