{kind=link}
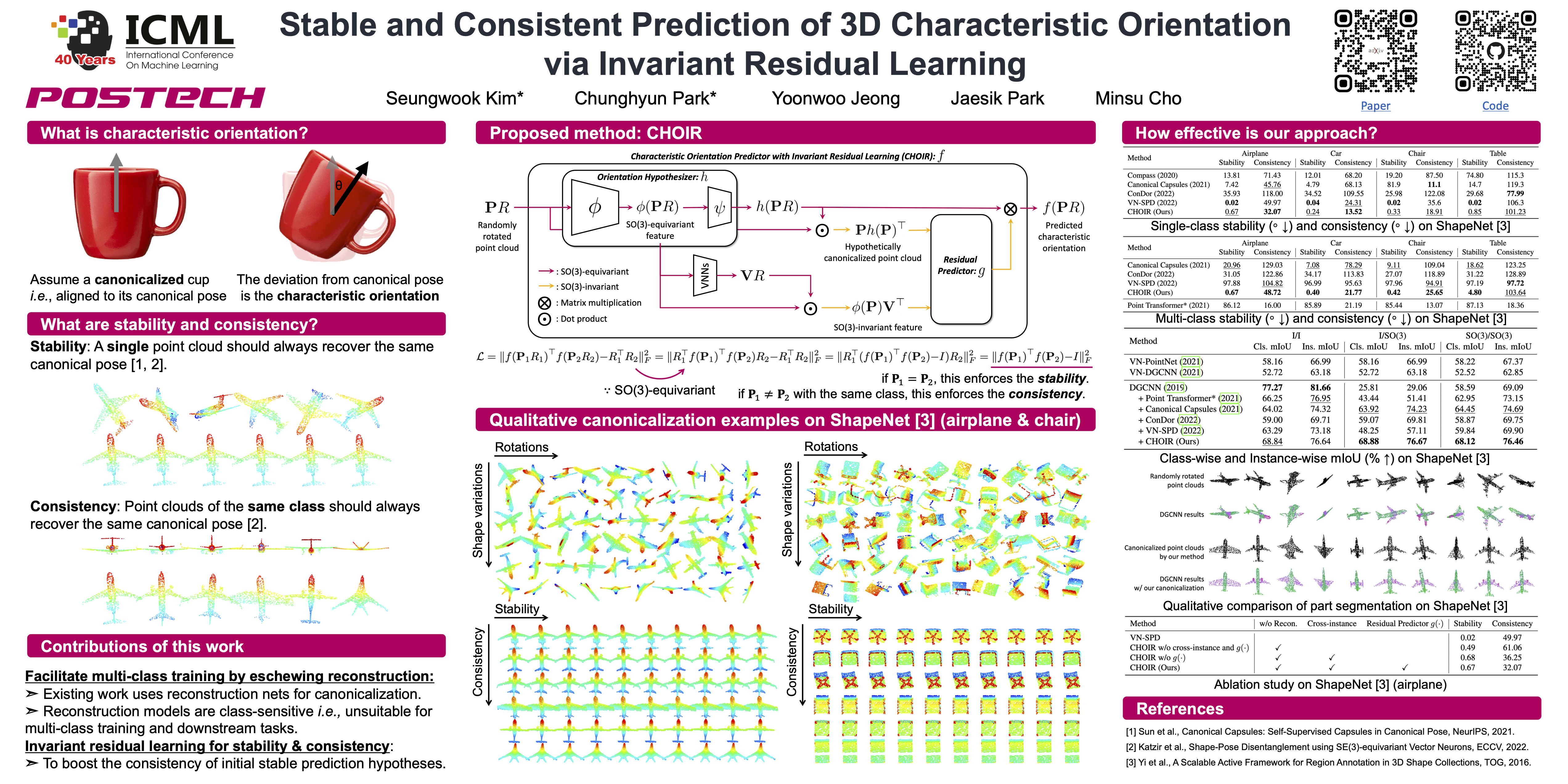
Learning to predict reliable characteristic orientations of 3D point clouds is an important yet challenging problem, as different point clouds of the same class may have largely varying appearances. In this work, we introduce a novel method to decouple the shape geometry and semantics of the input point cloud to achieve both stability and consistency. The proposed method integrates shape-geometry-based SO(3)-equivariant learning and shape-semantics-based SO(3)-invariant residual learning, where a final characteristic orientation is obtained by calibrating an SO(3)-equivariant orientation hypothesis using an SO(3)-invariant residual rotation. In experiments, the proposed method not only demonstrates superior stability and consistency but also exhibits state-of-the-art performances when applied to point cloud part segmentation, given randomly rotated inputs.