Seeing is not Believing: Robust Reinforcement Learning against Spurious Correlation
{kind=link}
Abstract
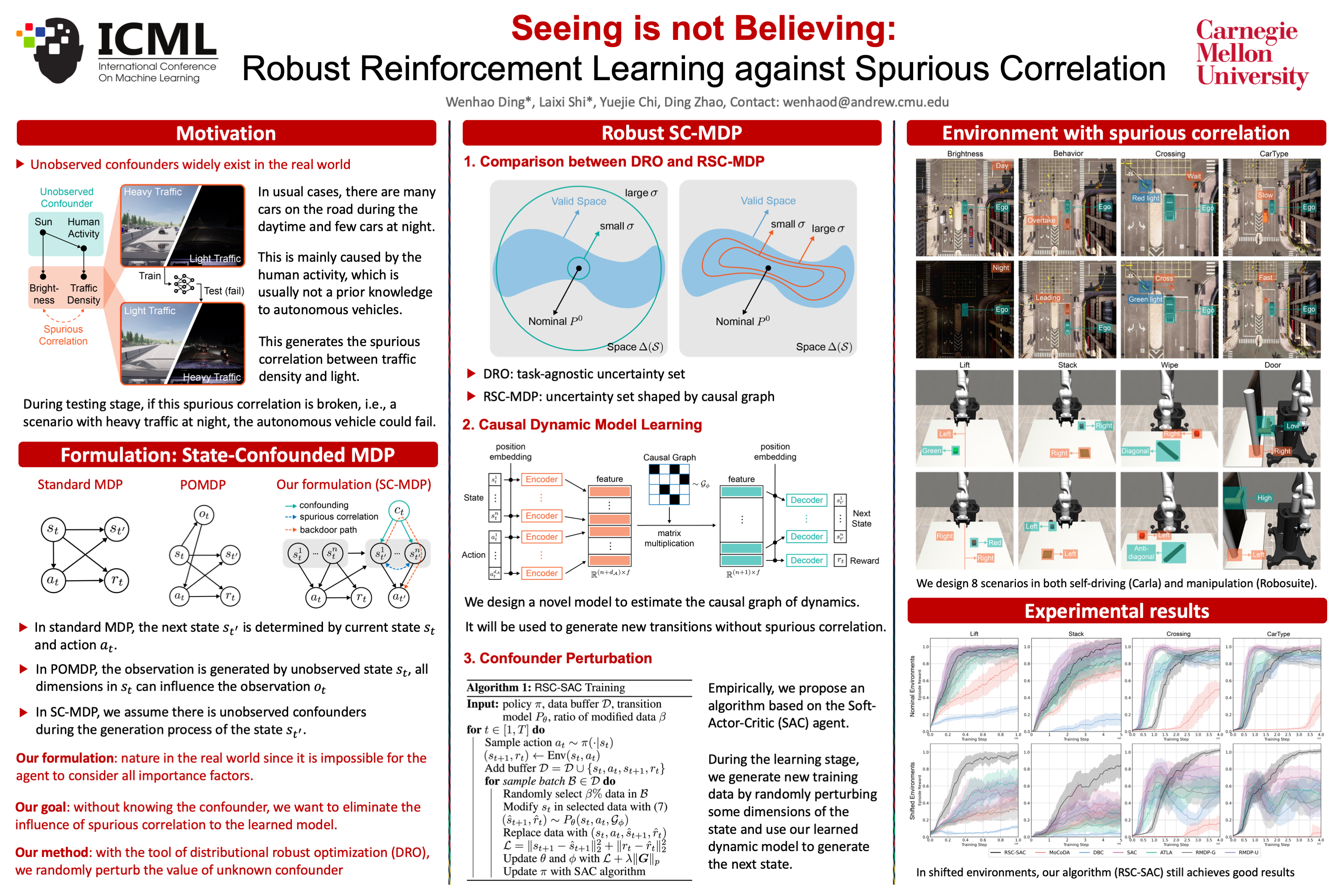
In this work, we consider one critical type of robustness against spurious correlation, where different portions of the state do not have causality but have correlations induced by unobserved confounders. These spurious correlations are ubiquitous in real-world tasks, for instance, a self-driving car usually observes heavy traffic in the daytime and light traffic at night due to unobservable human activity.A model that learns such useless or even harmful correlation could catastrophically fail when the confounder in the test case deviates from the training one.Although motivated, enabling robustness against spurious correlation poses significant challenges since the uncertainty set, shaped by the unobserved confounder and sequential structure of RL, is difficult to characterize and identify. To solve this issue, we propose Robust State-Confounded Markov Decision Processes (RSC-MDPs) and theoretically demonstrate its superiority in breaking spurious correlations compared with other robust RL.We also design an empirical algorithm to learn the robust optimal policy for RSC-MDPs, which outperforms all baselines in eight realistic self-driving and manipulation tasks.